CANとは?
自動車をはじめ、FA産業機器でも活用されている通信プロトコル「CAN」についてご説明します。
CANの成り立ち
CANとは、「Controller Area Network」の略で、ドイツのBosch社が開発したシリアル通信プロトコルです。CANと聞いて自動車を思い浮かべる方も多いかと思いますが、完成したのは1985年、実際に量産車に採用されたのは1990年が最初です。その後、1994年に国際標準化機構(ISO)により標準規格(ISO11898/ISO11519)になりました。そして現在では、ほぼすべての自動車に採用されています。そのほか工場の自動化(FA:ファクトリーオートメーション)など幅広い分野で活用されています。

CANの必要性
現在では、工場をはじめ医療現場などでも活用されているCANですが、もともとは自動車内で使用することを前提に開発された技術です。その背景には自動車の高性能化によって増える電子制御ユニット(ECU:Electronic Control Unit)への対応が挙げられます。制御内容が複雑になれば入出力も増えてECUは大型化しますし、複数のECU間でデータを共有すれば配線も増加します。それによって複雑化し、重量や部品点数も増え、製造コストが跳ね上がってしまいます。その解決策が少ない配線でも高速かつ確実な通信ができる、シリアル通信プロトコルだったのです。
従来型の通信方式
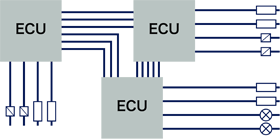
- 配線の本数が多い
- 重量が増加する
- 配線スペースを確保する必要がある
- 物理的な配線が増えて故障のリスクが上がる
- 故障診断の際にECUを個別に検査する必要がある
CANを活用した通信方式
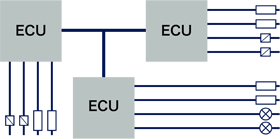
- 少ないハーネスで接続できる
- ECU同士の通信が容易に行える
- 拡張性が高い
- 1つの情報を複数のECUで共有できる
- ネットワーク全体の故障診断や処理が1ヶ所でできる
通信プロトコルの種類
車載ネットワークには「CAN」のほか、「LIN」「FlexRay」「MOST」などの通信プロトコルも利用されています。「LIN」はCANのサブネットワークとしての利用を想定し、低コストでシリアル通信が行える規格です。そして次世代車載ネットワークとして注目されているFlexRayは、CANよりも高速な通信が可能。CAN・LIN・FlexRayはエンジン制御などの通信に利用されますが、「MOST:Media Oriented Systems Transport」は、マルチメディア系の通信を想定しています。このように、CAN以外にもさまざまな通信プロトコルが存在するのです。
| 通信プロトコル | 最大通信速度 |
|---|---|
| CAN | 1Mbps |
| LIN | 20kbps |
| FlexRay | 10Mbps |
| MOST | 24.8Mbps (50Mbps/150Mbpsの規格もあり) |
上記のように通信速度が異なります。しかし、ハイスピードな通信プロトコルほどコストがかかるため、必要に応じて適したものを選択する必要があります。
CANの種類
CANは通信速度によって高速CAN「CAN-C」や低速CAN「CAN-B」のように分けられます。また、SAE(Society of Automotive Engineers)では、以下のように通信速度で分類します。
| クラス | 通信速度 | 用途 |
|---|---|---|
| クラスA | ~10kbps | ライト類、パワーウィンドウ、ドアロックなど |
| クラスB | 10~125kbps | メーターやオートエアコン、故障診断などのステータス情報系 |
| クラスC | 125kbps~1Mbps | エンジンやトランスミッション、ブレーキの制御などのリアルタイム制御系 |


