
ロボットビジョンのメリット
ロボットビジョンの疑問を解消
工場全体のファクトリーオートメーション(FA)を進めるうえで、ロボットビジョンはとても有効です。しかし、実際に産業用ロボットを利用している企業の皆様の中には、「使いたいけど難しいのでは?」「設定や調整に手間がかかるのでは?」とお考えの方も多いかもしれません。こちらでは、ロボットビジョンの特徴やメリットなどを事例からご紹介します。

このようなお悩みはありませんか?
自動車部品や電気電子機械の製造、食品や医薬品などの生産を行っている中で、このようなお悩みはありませんか?
製造現場でよくあるお悩み
- 製品に合わせて専用のラインを設計しないといけない
- 製品ごとに専用パレットやパーツフィーダーを用意しないといけない
- ティーチングに時間がかかり、立ち上げ作業工数がかかる
- 誤差の大きい製品なのでロボットでは正確に対応できない
すべてロボットビジョンで解決できます!
産業用ロボットは基本的に同じ動作を繰り返すだけなので、製品の位置やサイズなどにばらつきが発生すると動作を完了できません。そのため部品などの正確な位置決めが重要で、専用の治具やラインを製作する必要があります。この作業に膨大な手間やコストがかかるようでは、せっかく汎用性が高い産業ロボットを導入しても効果は半減。このような問題点を克服できるのがロボットビジョンです。

ロボットビジョンでどこまで自動化できるのか?
「省人化」は「活人化」につながります
FA化の目的は、人間が行っていた作業をロボットに置き替え、作業ミスの削減や効率化を図ることです。ただし、製造の現場を完全に無人化することは現段階では困難。そこでキーワードになるのが「省人化」と「活人化」です。自動化しにくい工程、また付加価値の高い工程に人員を配置することで、効率的かつ費用対効果の高い生産システムが設計できます。
導入事例01 製品搬送用パレットの費用を削減
専用の搬送用パレットや位置決め治具の制作コストを削減した導入事例です。
従来方式
- 品種A
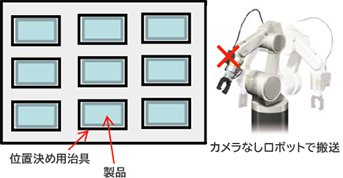
- 品種B
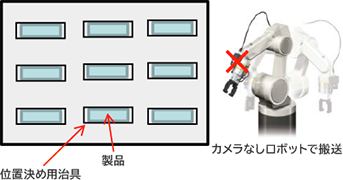
製品ごとにパレット・位置決め、治具を製作する必要がある
生産品目が増えれば製品搬送用パレットのコストが増大する
ロボットビジョン導入後
- 品種A
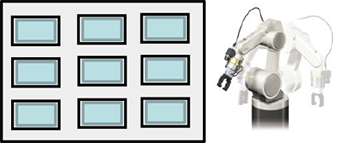
- 品種B
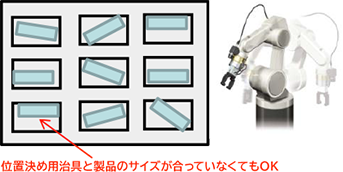
画像認識で位置決めをするので、専用治具は不要
製品を問わず、汎用パレットが使えるのでコスト削減が可能に
ロボットビジョンでどこまで自動化できるのか?
導入事例02 多品種に対応したライン生産
品種ごとに専用ラインを設計することが一般的ですが、それではコストがかさんでしまいます。そこで工程間のピック・プレースにロボットビジョンを導入した事例です。
従来方式
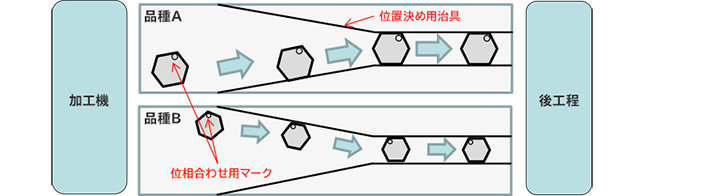
加工機から後工程に送るベルトコンベアに位置決め用治具が必要
ベルトコンベアでは同一製品しか流せない
産業用ロボット+ロボットビジョン導入後
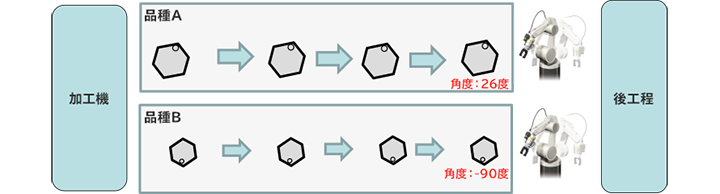
ピック・プレースにロボット+ロボットビジョンを導入
画像認識で位置を確認してピック・プレースするので治具は不要
ロボットビジョンでどこまで自動化できるのか?
導入事例03 多品種に対応したパーツフィーダー
品種ごとに用意していたパーツフィーダーをやめ、ロボットとロボットビジョンを導入した事例です。同じパーツフィーダーで複数の部品を流すことができるので、汎用性を高めることに成功しました。
従来方式
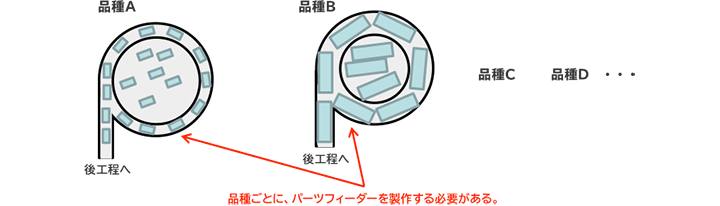
製品ごとにパーツフィーダーを用意する必要がある
生産品目が増えれば設備費用が増大する
産業用ロボット+ロボットビジョン導入後
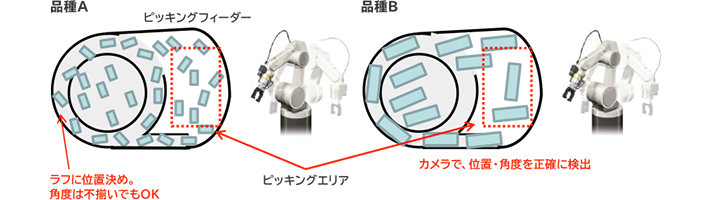
ピック・プレースをロボットで行うので同じパーツフィーダーで多品目に対応
画像認識で位置・角度を正確に検出できる
ロボットビジョンでどこまで自動化できるのか?
導入事例04 省スペース・多品目に対応したセル生産
従来は部品ごとに投入機を用意し、ライン上で製品組立を行っていたため、生産できる品目が限定されていました。ロボットを導入してセル生産にすることで設備投資を大幅に削減でき、短期間で生産システムを構築できます。また、専用の投入機やベルトコンベアが不要になるので省スペース化が可能です。
従来方式

専用機を使っているので汎用性に乏しい
ライン生産のため広い設置スペースが必要
産業用ロボット+ロボットビジョン導入後

パレットから部品をピックして完成品パレットに並べるので省スペース
プログラムを変更することで、さまざまな製品の生産に対応できる
導入事例05 検査+ピッキングが同時にできるライン生産
従来は検査用・位置決め用で個別にカメラを設置していましたが、最近では1台のカメラでピック位置の確認+検査(外観・寸法検査)を同時に行うことができます。そのため検査機材の導入費用を抑えることが可能です。
従来方式(カメラ2台)
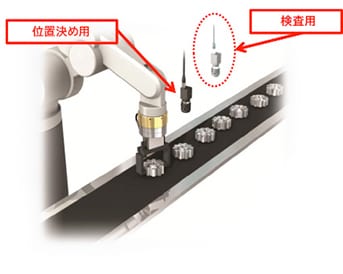
検査用と位置決め用で別々にカメラを設置
システム導入費が高くなる
検査・位置決め兼用カメラ(カメラ1台)
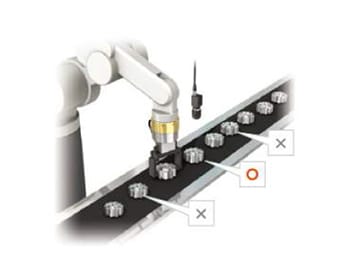
1台のカメラで位置決め・検査ができるので導入コストが削減できる
検査用データからOK品だけをピックできるので効率的
ロボットビジョンでどこまで自動化できるのか?
導入事例06 ロボットティーチングにかかる工数削減
従来の産業用ロボットは、座標制御のためライン立ち上げ時・品種替え時にティーチングを行う必要ありました。ロボットビジョンシステムを活用すれば、画像処理によってワークの位置・角度を認識し、キャリブレーションができるのでティーチングにかかる工数を削減できます。また、チィーチング技術者の育成コストもかかりません。
従来方式 (ティーチングプレイバック方式)

一般的な産業用ロボットは、ティーチングペンダントで実際にロボットを動かして動作を記録し、再生しながら動作確認をします。このような学習方法を「ティーチングプレイバック方式」と呼びます。ティーチング時に作業を止める必要があるので時間的ロスがありました。
オフラインティーチング
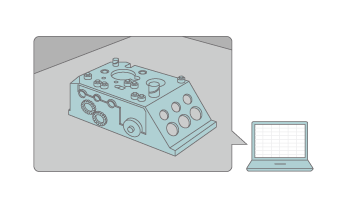
オフラインティーチングとは、PC上で作成したプログラムをロボットに転送する方式です。オフラインティーチングは、「テキスト型」「シミュレータ型」「エミュレータ型」「自動ティーチングシステム」などに分類されます。メリットは、実機を使用しないので作業を止める必要がなく、時間的なロスがないということです。
ティーチング技術者の育成

産業用ロボットを利用するうえでティーチング技術者(ティーチングマン)は必要不可欠です。しかし、熟練のティーチング技術者を育成するには時間がかかり、一般的に1〜2年ほど現場経験を要します。育成には手間と人件費がかかるため、現在はティーチング技術者が不足しています。そのため産業用ロボットが導入したくても技術者が足りないという状況に陥っています。
ロボットビジョンならティーチングが簡単!
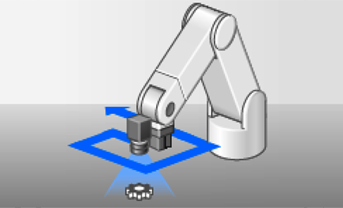
キーエンスのロボットビジョンは、ワンタッチでキャリブレーションを行う「オートキャリブレーション」を装備。ティーチングペンダントで行っていたティーチングが不要になり、迅速な立ち上げが可能。「ワンクリックで簡単動作」「誰が操作しても常に高精度」「設置位置がずれてしまっても即実行・即復旧が可能」「どこでも迅速かつ確実な再現性」といったメリットがあります。ロボットビジョンシステムを導入することでティーチングにかかっていた工数が削減でき、ティーチング技術者を育成する手間もかかりません。
ロボットビジョンでできる検査例
ロボットビジョンのセンサ(カメラ)と画像認識技術を活用すれば、さまざまな検査を行うことができます。こちらでは、一般的な検査例をご紹介します。
加工部品の箱詰め

左上のワークから順に座標出力を行ないます。
ネジ締め位置検出
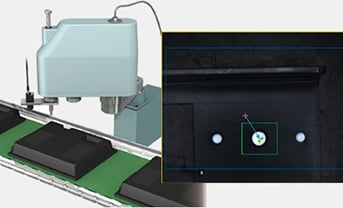
ネジ締め位置のずれ量を出力します。
基板搭載時のデバイズのつかみズレ補正
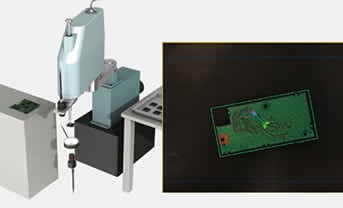
ワークのX、Y、角度を出力します。
外観検査時の位置決め

複数ワークの位置座標を同時に出力します。
ロボットビジョンでどこまで自動化できるのか?



