KV-Xシリーズ × IXシリーズ
接続ガイド
PDFとして使用する場合、画面右上の「このページを印刷する」をクリック後、プリンターの設定で「PDFとして保存」を選択し、保存してください。
KV-Xシリーズ × IXシリーズ EtherNet/IP™ 接続ガイド

EtherNet/IP対応通信ユニット IXシリーズ

目次
Step1:接続に必要な機器
下記の機器を準備してください。

- ※ KV-5500/EP21V/NC1EP使用時は、STP/UTPクロスケーブルを使用してください。

One point
イーサネットスイッチ(NE-Q05(P))を使用すると、IXシリーズを複数台接続できます。

Step2:IXシリーズの設定
IX-Navigatorを使用してIXシリーズの設定を行います。ここでは、PCとIXシリーズをLANケーブルで1:1で接続してIPアドレスを自動設定して接続する場合を例に説明します。IPアドレスを指定して接続する場合はP7のOnePointを参照してください。
1PCとIXシリーズ(センサアンプ)のイーサネットポートをLANケーブルで接続し、IX-Navigatorを起動します。[起動メニュー]ダイアログが表示されるので、「1台」にチェックを入れ、〔直接接続〕、〔接続開始〕の順にクリックします。

2センサの運転画面が表示されます。センサが運転中の場合は〔設定する〕をクリックします。運転を停止するか確認するダイアログが表示されるので、〔OK〕をクリックし、〔センサ拡張設定〕をクリックします。

3[センサ拡張設定]ダイアログが表示されます。「入力」タブを開き、「プログラム切り換え方法」の「パネル/PC/通信(DL)」を有効にします。
- ※プログラム番号をKV-Xシリーズから切り換えない場合は、この手順は不要です。

4「機器設定」タブを開きます。「通信ユニット(DL)設定」の〔設定〕をクリックします。
[通信ユニット(DL)設定]ダイアログが表示されるので、KV-Xシリーズで読み出す通信データに測定値を割り付け、〔OK〕をクリックします。最大15個の測定値を設定して通信できます(子機使用時も親機と合わせて最大15個です)。
- ※KV-Xシリーズで測定値を読み出さない場合は、この手順は不要です。

5〔センサ設定〕をクリックして、センサの検出やツールに関する設定を行います。
設定方法の詳細は『IXシリーズ ユーザーズマニュアル』を参照してください。

6〔▶運転する〕をクリックしてセンサを運転モードに切り換えます。その後、〔接続切断〕をクリックして設定を終了します。

One point
IPアドレスを指定して接続する方法
ここでは、PCとIXシリーズに下記のIPアドレスを割り当てる場合を例に説明します。
- PC………192.168.0.200
- IXシリーズ………192.168.0.5
- ※PCのIPアドレスは事前に設定してください。
1. PCとIXシリーズ(センサアンプ)のイーサネットポートをLANケーブルで接続し、IX-Navigatorを起動します。[起動メニュー]ダイアログが表示されるので、〔ネットワーク接続〕、〔センサ検索〕の順にクリックします。

2. 検索が完了するとPCと接続しているIXシリーズが表示されるので、〔接続開始〕をクリックします。既にIPアドレスが設定されている場合は、〔接続開始〕をクリックするとセンサの設定画面が表示されます。

3. IPアドレスが未設定の場合、[ネットワーク設定]ダイアログが表示されるので、IXシリーズに割り当てるIPアドレスを設定します。ここでは、以下のとおりに設定して〔接続開始〕をクリックし、センサの設定画面を表示します。

<Ethernet設定>
| IPアドレス | 192.168.0.5 |
|---|---|
| サブネットマスク | 255.255.255.0 |
| デフォルトゲートウェイ | (空欄) |
Step3:KV-Xシリーズの設定
このステップではKV-Xシリーズの設定手順を説明します。キャプチャ中に表示されている"Vendor Series"という文字列は、実際に接続する機器名に読み換えてください。
1KV STUDIOを起動し、プロジェクトを新規作成します。
対応機種に「KV-X550※」を選択し、〔OK〕をクリックします。
- ※対応機種は使用される機種にあわせて選択してください。

[ユニット構成設定の確認]ダイアログが表示されるので、〔はい(Y)〕をクリックし、ユニットエディタを開きます。

2ユニットエディタの「ユニット設定(2)」タブで、KV-XシリーズのIPアドレスを設定します。

KV-X500シリーズではポート2でのみEtherNet/IP通信を使用できます。
ポート2のIPアドレスとサブネットマスクを設定してください。
ここでは、以下のとおり設定します。

3[EtherNet/IP設定]を起動します。
ユニットエディタ上でEtherNet/IP設定のアイコンをクリックします。

設定方法を選択するダイアログが表示されるので、KV-Xシリーズと接続する機器をEthernetケーブルで接続した状態で〔自動設定(オートコンフィグレーション)(A)〕をクリックします。

4実機とユニットエディタの構成が異なる場合、プロジェクトの転送を確認するダイアログが表示されるので、PCとKV-XシリーズをUSBケーブルで接続した状態で〔はい(Y)〕をクリックし、プロジェクトを転送します。

5プロジェクトの転送が完了すると、[機器検索設定]ダイアログが表示されるので、〔検索(F)〕をクリックします。

オートコンフィグレーション完了後、接続する機器が自動で登録されるので、〔OK〕をクリックして[EtherNet/IP設定]ウィンドウを閉じます。

6ユニットエディタの〔OK〕をクリックし、[ユニットエディタ]ウィンドウを閉じます。

7下記のダイアログが表示されるので、〔OK〕をクリックし、コネクションで使用する変数を作成します。


8[EtherNet/IP機器 変数設定]ウィンドウが表示されます。変数名を入力して2回〔OK〕をクリックし、サイクリック通信用の構造体変数を作成します。
登録した変数は[変数編集]ウィンドウから確認できます。



One point
機器を手動で追加する場合
「EtherNet/IP設定」の[機器一覧(1)]タブで、接続する機器をドラッグ&ドロップして機器設定を作成します。


配下に各種センサアンプやI/Oユニットを接続する機器を設定する際は、その配下に接続する各種機器も併せて登録します。
下図は、架空の通信ユニットVendor Series Comに、架空のセンサVendor Series Sensorを接続する場合の例です。
キャプチャ中のVendor Series Com・Vendor Series Sensorという文字列は、実際に接続する通信ユニット・センサ等に読み換えてください。

One point
EtherNet/IPの送受信データにリンクデバイス(B/W)を割り付ける方法
【表示(V)】>【CPU システム設定(P)】>【システムの設定】>【その他の設定】で〔EtherNet/IP 通信の送受信データにデバイスを割り付ける(D)〕にチェックし、〔EtherNet/IP 設定更新時に変数設定ダイアログを表示する(E)〕のチェックを外した状態で〔OK〕をクリックすると、EtherNet/IP 設定時はリンクデバイス(B/W) に割り付くようになります。

One point
キーエンス社製センサ設定ファイル(ez1ファイル)をインポートする方法
機器一覧に接続する機器が表示されない(センサ設定ファイルがインポートされていない)場合、キーエンス社製センサ設定ファイル(ez1ファイル)のインポートが必要です。
[EtherNet/IP設定]ウィンドウから、【EDSファイル(D)】→【登録(I)】を選択し、使用される機器のキーエンス社製センサ設定ファイル(ez1ファイル)をインポートします。
キーエンス社製センサ設定ファイル(ez1ファイル) ダウンロードページ

One point
コネクションを変更することで、最大16ワード(32バイト)のプロセスデータを取得できます。[コネクション設定]ダイアログから設定してください。デフォルトでは16ワード(32バイト)のプロセスデータを取得できます。

プロセスデータは、NQシリーズのポートごとに割り付けられます。例えば、デフォルト(16ワード)の設定では以下のとおり、1ポートにつき3ワードずつ割り付けられています。
| 先頭からのオフセット | データ |
|---|---|
| +0 | P1_プロセス入力データ 0 |
| +1 | P1_プロセス入力データ 1 |
| +2 | P1_プロセス入力データ 2 |
| +3 | P2_プロセス入力データ 0 |
| : | : |
プロセスデータで取得できる内容については、接続するIO-Linkデバイスのマニュアルを参照してください。
Step4:設定データの転送とモニタ
このステップでは接続する機器の情報をモニタする方法について説明します。
キャプチャ中に表示されている"Vendor Series"という文字列は、実際に接続する機器名に読み換えてください。
1メニューから【モニタ / シミュレータ(N)】>【PLC 転送 → モニタモード(C)】を選択します。KV-Xシリーズ に設定データを転送し、モニタモードに移ります。

2ワークスペースの接続する機器を右クリックし、【センサIOモニタ(M)】を選択すると、機器の情報を簡単にモニタできます。


One point
リアルタイムチャートモニタ(RTCM)でモニタする方法
リアルタイムチャートモニタを起動して、グラフで確認することもできます。
「センサ IOモニタ」上で右クリックし、【リアルタイムチャートモニタ (H)】を選択します。

リアルタイムチャートモニタは自動でスケーリングを実行するので、レンジ調整は不要です。
参考:変数割付
入力(IX→KV-X)
| 変数名 | データ型 | 項目 | |
|---|---|---|---|
| メンバ名 | |||
| VariableName_IN | DL_EP1_IX_IN100 | ||
| DL_EP1_ErrorStatus | BOOL | DL-EP1エラー状態 | |
| WarningStatus | BOOL | ワーニング状態 | |
| ErrorStatus | BOOL | エラー状態 | |
| ErrorStatus_Main | BOOL | 親 エラー状態 | |
| ErrorStatus_Ex | BOOL | 子 エラー状態 | |
| ValueOverRange | ARRAY[0..14] OF BOOL | 測定値 オーバーレンジ | |
| ValueUnderRange | ARRAY[0..14] OF BOOL | 測定値 アンダーレンジ | |
| ValueInvalid | ARRAY[0..14] OF BOOL | 測定値 無効 | |
| ProgChgResp_Main | BOOL | 親プログラム切換応答 | |
| ExtOutput1_Main | BOOL | 親 外部出力1 | |
| ExtOutput6_Main | BOOL | 親 外部出力6 | |
| ProgChgResp_Ex | BOOL | 子プログラム切換応答 | |
| ExtOutput1_Ex | BOOL | 子 外部出力1 | |
| ExtOutput6_Ex | BOOL | 子 外部出力6 | |
| Trg_TimingResp_Main | BOOL | 親トリガ/タイミング応答 | |
| ExtOutput2_Main | BOOL | 親 外部出力2 | |
| ExtOutput7_Main | BOOL | 親 外部出力7 | |
| Trg_TimingResp_Ex | BOOL | 子トリガ/タイミング応答 | |
| ExtOutput2_Ex | BOOL | 子 外部出力2 | |
| ExtOutput7_Ex | BOOL | 子 外部出力7 | |
| Zero_OfsResp_Main | BOOL | 親 ゼロ/オフセット応答 | |
| ExtOutput3_Main | BOOL | 親 外部出力3 | |
| ExtOutput8_Main | BOOL | 親 外部出力8 | |
| Zero_OfsResp_Ex | BOOL | 子 ゼロ/オフセット応答 | |
| ExtOutput3_Ex | BOOL | 子 外部出力3 | |
| ExtOutput8_Ex | BOOL | 子 外部出力8 | |
| ResultUpdate_Main | BOOL | 親 結果更新完了 | |
| ExtOutput4_Main | BOOL | 親 外部出力4 | |
| ExtOutput9_Main | BOOL | 親 外部出力9 | |
| ResultUpdate_Ex | BOOL | 子 結果更新完了 | |
| ExtOutput4_Ex | BOOL | 子 外部出力4 | |
| ExtOutput9_Ex | BOOL | 子 外部出力9 | |
| EmitStop_Main | BOOL | 親 投光停止状態 | |
| ExtOutput5_Main | BOOL | 親 外部出力5 | |
| ExtOutput10_Main | BOOL | 親 外部出力10 | |
| EmitStop_Ex | BOOL | 子 投光停止状態 | |
| ExtOutput5_Ex | BOOL | 子 外部出力5 | |
| ExtOutput10_Ex | BOOL | 子 外部出力10 | |
| ErrorOccurDevNum | UINT | エラー発生機器番号 | |
| ErrorCode | UINT | 発生中のエラーコード | |
| Value | ARRAY[0..14] OF DINT | 測定値 | |
| Reserved | ARRAY[0..14] OF UDINT | ||
参考:サンプルプログラム
撮像指令
変数リスト
| 変数 | データ型 | コメント |
|---|---|---|
| xReq | BOOL | 撮像開始 |
| diValue | DINT | ツール1測定値 |
プログラム

<ニモニックリスト>
LDP xReq
OR IX_OUT.Trg_TimingReq_Main
ANB IX_IN.Trg_TimingResp_Main
OUT IX_OUT.Trg_TimingReq_Main
LD _AlwaysOn
MOV.L IX_IN.Value[#0] diValue
動作説明
- ① xReqの立ち上がりで、IX_OUT.Trg_TimingReq_Main(親トリガ/タイミング要求)をONします。
- ② IXシリーズが撮像を開始すると、 IX_IN.Trg_TimingResp_MainがONし、IX_OUT.Trg_TimingReq_Main(親トリガ/タイミング要求)をOFFします。
- ③ IX_IN.Value[#0](測定値1)にStep2で割り付けたデータが更新されるので、 IX_IN.Value[#0](測定値1)のデータをdiValueに転送します。
- ※KV-Xシリーズからの撮像を指令する場合、KV STUDIOのEtherNet/IP設定ウィンドウでコネクション名を「モニタデータ/外部入力」に設定してください。
プログラム番号切換
変数リスト
| 変数 | データ型 | コメント |
|---|---|---|
| xPrgSwitchReq | BOOL | プログラム切換 |
| uiPrgNo | UINT | 切換プログラム番号 |
| xPrgSwitchFailure | BOOL | プログラム切換失敗 |
| xPrgSwitchSuccess | BOOL | プログラム切換成功 |
| xPrgSwitchBusy | BOOL | プログラム切換中 |
| auiWrResult | ARRAY[0..4] OF UINT | SPWR |
| auiRdResult | ARRAY[0..4] OF UINT | SPRD |
プログラム

<ニモニックリスト>
LDP xPrgSwitchReq
MOV uiPrgNo auiWrResult[#4]
MOV #0 auiWrResult[#0]
SPWR #0 #1 #0 #10931 auiWrResult[#0]
LDP xReq
OR xPrgSwitchBusy
ANB xPrgSwitchFailure
ANB xPrgSwitchSuccess
OUT xPrgSwitchBusy
LD xPrgSwitchBusy
ANB auiRdResult[#0].0
SPRD #0 #1 #0 #10932 auiRdResult[#0]
LDB auiRdResult[#0].0
MPS
LDB auiRdResult[#0].1
FUNAND EQ auiRdResult[#4] +0
ANL
MOV #0 auiRdResult[#0]
MRD
LDB auiRdResult[#0].1
FUNAND EQ auiRdResult[#4] +2
OR auiRdResult[#0].1
ANL
OUT xPrgSwitchFailure
MPP
LDB auiRdResult[#0].1
FUNAND EQ auiRdResult[#4] +1
ANL
MEP
OUT xPrgSwitchSuccess
動作説明
- ① xPrgSwitchReqの立ち上がりで、IXシリーズのプログラム番号を、uiPrgNoに格納された番号のプログラムに切り換えるためにSPWR命令を実行します。同時に、xPrgSwitchBusyをONします。
- ② SPRD命令を実行し、「プログラム切換実行結果」を読み出すことでプログラム切り換えが完了したかどうかを確認します。
- ③ 完了が確認できるまで、「プログラム切換実行結果」を読み出し続けます。
-
④
プログラム切り換えが失敗した場合は、xPrgSwitchFailureをONし、xPrgSwitchBusyをOFFします。
プログラム切り換えが完了した場合は、xPrgSwitchSuccessをONし、 xPrgSwitchBusyをOFFします。
- ※KV-Xシリーズからのプログラム番号を切り換える場合、IXシリーズの「プログラム切り換え方法」を「パネル/PC/通信(DL)」に設定してください。
One point
センサ設定命令
センサ設定命令(SPWR命令(センサパラメータ書込命令)、SPRD命令(センサパラメータ読出命令))を使用することで、指定したセンサのパラメータを書込/読出することができます。

One point
マニュアルレスでラダー作成可能!
オペランド入力時に、構造体のメンバコメントの一部を入力するだけで接点などの入力ができます。(RT エディット機能)
効率よく変数を検索でき、プログラム作成工数削減につながります。
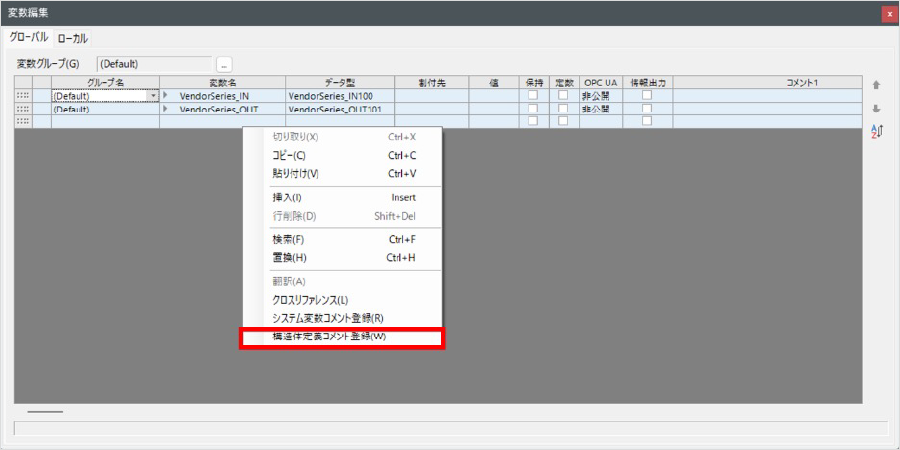
サイクリック通信用変数名などを対象にRT エディットを有効にさせるために以下の手順が必要です。
① [変数編集] ウィンドウで右クリックして、【構造体定義コメント登録(W)】をクリックします。
② 下記ダイアログが表示されます。〔OK〕をクリックします。
③ 構造体のメンバコメントの一部に「trg」が入っている変数の一覧が表示されます。
選択してラダープログラムに入力できます。
