搬送機・産業用ロボットの軌道測定の効率化

製造業・物流業のデジタルトランスフォーメーションにより、工場や物流センター内での作業の自動化が進みました。搬送機・産業用ロボットの導入はその代表例であり、今や欠かすことのできない装置です。
しかし、これらの装置による作業が不正確であったり、ラインスピードについて行けなかったりという理由で、ボトルネックになっているケースも見受けられます。
その原因の多くは動作精度の不足であり、動作部の軌道を測定することで問題点を突き止めることができます。
ここでは、搬送機・産業用ロボットの軌道測定に必要な基礎知識や測定の必要性と測定のポイントについて説明。さらに測定機器の違いによる測定効率の差に着目し、効率化を実現するさまざまな事例を紹介します。
- 搬送機・産業用ロボットの軌道とは
- 軌道の特徴
- 搬送機・産業用ロボットの軌道測定の必要性
- 搬送機・産業用ロボットの軌道測定
- 搬送機・産業用ロボットの軌道測定の課題と解決法
- 搬送機・産業用ロボットの軌道測定の効率化

搬送機・産業用ロボットの軌道とは

搬送機・産業用ロボットの軌道とは、搬送機の可動部分や産業用ロボットが動作したときに、ロボットハンド・関節などが描く軌跡のことです。
倉庫や工場などで使用される搬送機や産業用ロボットが得意とする作業は、正確な反復作業です。正確な反復作業にとっては、決められた速度での動作と位置決め精度が最も重要です。この2つの機能を実現するには、搬送機の可動部分や産業用ロボットのロボットハンド・関節などが正しい軌道を描いて動作していなければなりません。
軌道の特徴
軌道には、装置によって特徴があります。ここでは垂直搬送機と垂直多関節ロボットが描く軌道の特徴について紹介します。
搬送機の軌道
搬送装置の種類はさまざまで、昇降装置・コンベア・無人搬送車などがあります。なかでも昇降装置の一種である垂直搬送機は動作距離が長く、正常な昇降ケージの動作には高い直進性が求められます。
垂直搬送機とは、物流センターや工場などの建物に設置される荷物を垂直方向に搬送する装置のことです。荷物用エレベーターとは異なり、建築基準法上の「昇降機」に該当しないため、建築確認申請や労働基準局の許可や設置後の定期検査報告などが不要です。荷物の搬送に特化しているため搬送速度を速くすることができ、入庫や出庫を行う搬送装置と組み合わせることで、効率的な搬送システムを構築することが可能です。このことから、物流センターや工場などでは多く導入されています。
垂直搬送機は一定の速度で一直線に上下します。また、駆動装置にサーボモーターを搭載したタイプでは滑らかな加速と減速が可能で、搬送物への負担や機械装置への負荷を低減し、停止時間を短縮することができます。さらに、途中で停止させることも可能です。
このような動作であることから、垂直搬送機は長距離の直線的な動作はもちろん、途中での停止など多様な軌道を描きます。
産業用ロボットの軌道
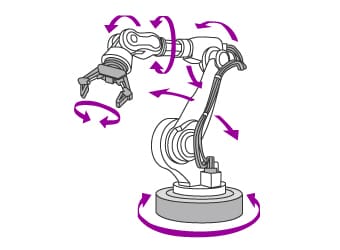
産業用ロボットには、垂直多関節ロボット・水平多関節ロボット(スカラロボット)・直交ロボットなど多くの種類があります。なかでも垂直多関節ロボットは、人間の腕のような形状で動作の自由度が高く、ロボットハンドや関節は複雑な軌道を描きます。
垂直多関節ロボットは、三次元空間作業に必要な6軸機構が主流です。「軸」ともいわれる関節にはサーボモーターが内蔵されており、複雑で滑らかな動作が可能であるため汎用性が非常に高く、ピッキングから溶接や塗装、組み立てまで幅広い工程に導入されています。ただし、直交ロボットなどに比べて構造が複雑で機械剛性が低いため、高速での動作ではオーバーシュートや振動が発生しやすく、緻密な制御が必要です。
このように、繊細な機構を持ち自由な動作を実現する垂直多関節ロボットは、さまざまな産業機器のなかでも、最も複雑な軌道を描きます。
搬送機・産業用ロボットの軌道測定の必要性
搬送機・産業用ロボットの動作軌道は、搬送する製品による負荷・構成する部品間の摩擦・モーターの電磁ブレーキの劣化などによって変化し、搬送機・産業用ロボットが行う作業にさまざまな悪影響を与えます。
たとえば垂直搬送機は、コンベアから搬送されてきた製品を正確な位置で昇降ケージに搭載して上下の段に移動し、次のコンベアに送り出します。搬送する製品の重量が大きくなればモーターに負荷がかかって理想の軌道で動作することができなくなり、電磁ブレーキが劣化すると正しい位置で停止することができなくなります。また、ガイドレールにゆがみがあると軌道に揺れが発生します。
製品を自動的につかんで搬送するような産業用ロボットでは、関節に設けられたモーターの性能やアームの剛性が不足していると、ロボットハンドやアーム・関節の軌道に揺れが発生し、位置決めに時間がかかってタクトタイムが長くなったり正確なピッキングやパレタイズが不可能になったりします。
搬送機・産業用ロボットの動作精度は、搬送機や産業用ロボットを構成するモーターの性能やフレーム・アーム・関節の強度など、さまざまな部品の影響を受けます。このため、動作精度に問題が発生すると、原因の特定は非常に困難です。しかし軌道の精度を測定することで、このようなトラブルの原因も、すばやく特定することができます。また、定期的に測定することで、機器の動作状態の変化を把握することができ、搬送機・産業用ロボットの予防保全や予知保全なども可能になります。
搬送機・産業用ロボットの軌道測定
搬送機・産業用ロボットの軌道測定は、空間を動作する可動部が描く軌跡が測定の対象です。このため、測定には一般的な製品の寸法測定とは異なる留意点があります。
測定のポイント
軌道測定のポイントは、搬送機と産業用ロボットでは異なります。ここでは、垂直搬送機と垂直多関節ロボットを例に、測定のポイントを紹介します。
垂直搬送機
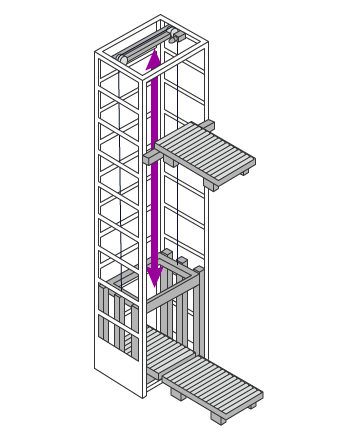
垂直搬送機では、昇降する昇降ケージの軌道を測定します。昇降ケージ内のコンベアや荷物台が直線的に上昇し、正しい位置で停止するかを測定することで、動作精度を確認することができます。
駆動モーターの能力が不足していると下部でオーバーランが発生します。モーターの電磁ブレーキが劣化していると上部でのオーバーランとなり、正しい位置で停止することができません。また、ガイドレールがゆがんでいると、昇降ケージの軌道に揺れが発生します。
このように、垂直搬送機では下部と上部の停止位置、昇降中に昇降ケージ内のコンベアや荷物台が描く軌道を測定することが重要です。
垂直多関節ロボット
産業用ロボットでは、ロボットハンドや関節の軌道を測定します。ロボットハンドと関節の軌道を測定することで、モーターの能力やアームの剛性などを確認することができます。
産業用ロボットの関節にはモーターが内蔵されており、関節の数に比例して動作精度の実現が難しくなります。6軸多関節ロボットなどでは多くのモーターを搭載しているため、これらのわずかな動作不良が軌道を乱します。また、アームの剛性が不足していると動作時の負荷を支えきれずに振動が発生し、プログラムどおりの動作の実現が困難になります。さらに、これらはロボットハンドが把持や加工などの作業を行う際に重要な位置決め精度に大きな影響を与えます。
これらから、産業用ロボットではロボットハンドや関節が描く軌道と停止位置の測定が欠かせません。
搬送機・産業用ロボットの軌道測定の課題と解決法

搬送機・産業用ロボットの軌道は、導入時の設置やティーチングの際はもちろん、導入後の定期的なメンテナンスでも確認が必要です。搬送機・産業用ロボットの軌道は、可動部やアクチュエータ・関節の動きを測定します。直線運動の軌道の場合はダイヤルゲージなどのハンドツール、三次元的な軌道はレーザートラッカーなどの三次元測定機で測定します。
しかし、測定箇所が多いためハンドツールでは時間がかかり、測定精度は測定者の技量によって大きく異なります。また、三次元的な軌道の測定が困難であるという根本的な問題があります。
レーザートラッカーは三次元的な軌道を測定することができますが、操作に熟練が必要であるため、扱える測定者が限られます。軌道測定におけるこのような課題が、製造ラインの立ち上げの遅延や導入後の動作不良の原因になるケースが多くありました。
これらの問題を解決すべく、最新式の三次元測定機が活用されるケースが増えてきています。
キーエンスのワイドエリア三次元測定機「WM-6000シリーズ」は、測定したい箇所に取り付けたワイヤレスプローブの位置を読み取ることで高精度な測定が可能です。
直線距離が長い搬送機の軌道も、産業用ロボットのロボットハンドが描く三次元的軌道も、測定範囲内なら1人で簡単に測定することができます。また、ハンドツールに比べて測定結果がバラつくことなく、定量的な測定が可能。測定データは即時に保存されるため、設計データとの比較が可能で品質管理にも役立てることができます。


搬送機の軌道ゆがみ測定
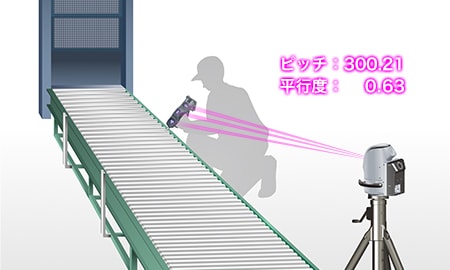
搬送機の軌道のゆがみをダイヤルゲージやレーザー距離計などで測定するには、測定する位置で搬送機を停止させる必要があります。測定精度は測定する位置の数に比例するため、高精度を求める場合は停止する回数が膨大になります。
また、測定する位置や測定器の当て方の違いにより測定値が変わるため、正確な測定には測定方法や測定器具の取り扱いなどの知識と技術が必要です。このようなことから、ダイヤルゲージやレーザー距離計などによる搬送機の軌道のゆがみの測定には膨大な時間と熟練の測定者が必要です。
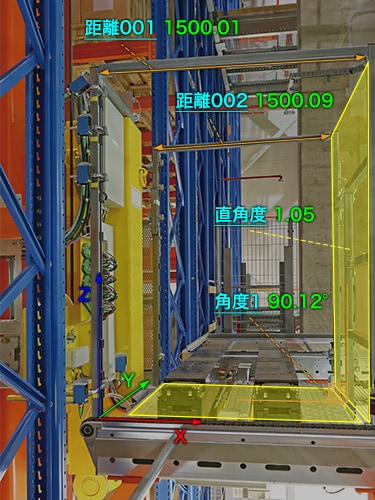
「WM-6000シリーズ」なら、搬送機の可動部にワイヤレスプローブを取り付け、ワイヤレスプローブが描く軌道を読み取るだけで測定できます。測定範囲が広いため長距離の軌道も1人で簡単に高精度な測定が可能で、取得したデータからガイドレールの反りやゆがみなどが確認できます。また、各ポイントの三次元座標も測定できるため、軌道の真直度や平行度を測定することも可能です。
また、測定結果は即時にデータとして保存され、3D CADファイルから読み込んだ軌道とプログラム上の軌道を比較したり、測定結果をCADデータとして出力したりといったことも可能です。
「WM-6000シリーズ」ではムーバブルカメラでプローブをトラッキングしながらプローブの位置と姿勢を高精度に認識し、プローブサーチカメラでワイヤレスプローブから発する光を常に追跡します。これにより、広範囲な測定領域のどこにプローブがいても、瞬時に位置を認識することができます。

- A
- ムーバブルカメラ
- B
- プローブサーチカメラ
- C
- ワイヤレスプローブ
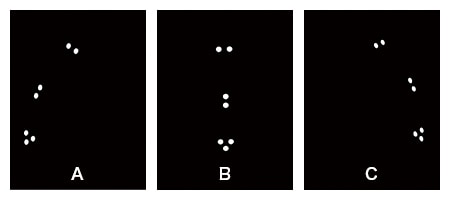
- A
- 左に倒した場合
- B
- 中央の場合
- C
- 右に倒した場合
産業用ロボットの軌道測定
産業用ロボットのロボットハンドの停止位置や軌道をレーザートラッカーなどで測定するには、測定機や測定方法に関する高い知識が必要です。操作にも熟練が必要で、扱える測定者は限られます。また、ダイヤルゲージなどのハンドツールでは、産業用ロボットが描く三次元的な軌道の測定は困難です。
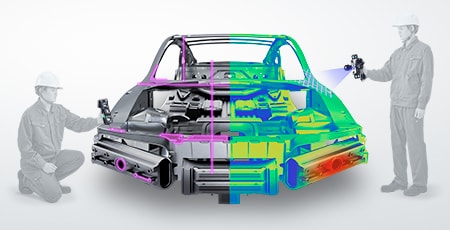
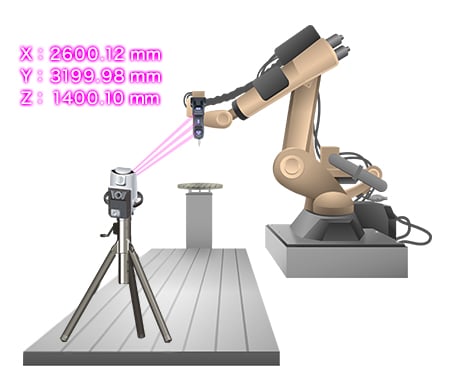
「WM-6000シリーズ」なら、ロボットハンドにワイヤレスプローブを取り付け、ワイヤレスプローブが描く軌道を読み取るだけで測定できます。たとえば6軸の垂直多関節ロボットが描く三次元的な軌道も、1人で簡単に測定できます。仮想線や基準座標を自由に設定して軌道を測定することが可能で、オートトリガー機能を使えば軌道を連続的な点群データとして取得できます。
さらに、持ち運びが可能なポータブルタイプなので、一般的な三次元測定機では不可能な、現場で設置精度を三次元で測定したいといったニーズにも対応することができます。

- 1
- 運ぶ 専用ケースに入れて持ち運びができます。
- 2
- 設置する 2本のケーブルをつなぐだけ。
- 3
- ボタンを押す
搬送機・産業用ロボットの軌道測定の効率化
「WM-6000シリーズ」なら、測定ポイントにワイヤレスプローブを取り付けるだけの簡単な操作で搬送機・産業用ロボットの軌道を1人で測定することができます。さらに、これまでに紹介した以外に、以下のようなメリットがあります。
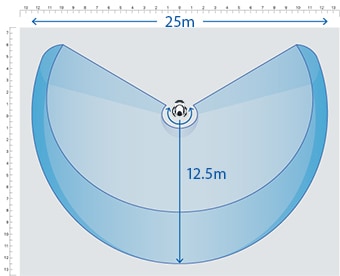
- 広範囲を高精度に測定可能
- 最大測定範囲25mの広範囲なエリアを、高精度に測定可能。測定の手順を記憶させ、同じ箇所を測定することができる「ナビ測定」モードも搭載しているため、誰が測定してもデータがバラつきません。
- 測定結果を3Dモデルで出力できる
- 測定した要素は、STEP/IGESファイルとしてエクスポートできます。図面のない製品でも、現物の測定結果を基に、3D CADデータを作成可能です。
- わかりやすいインターフェース
- 三次元測定機のインターフェースというと、難解で馴染みにくいコマンドが多いイメージがありますが、「WM-6000シリーズ」では、画像やアイコンなどで誰にでも親しみやすい操作性を追求し、直感的な操作を可能にしました。

- データをまとめる統計解析機能
- ナビゲーション測定実行後の測定結果は、自動的にハードディスクドライブに保存されます。保存されたデータを抽出して統計値確認・トレンドグラフ・ヒストグラムなど、各種統計解析ができます。
「WM-6000シリーズ」は、搬送機・産業用ロボットの軌道測定はもちろん、3D CADデータとの照合作業などを強力にサポート。搬送機・産業用ロボットの製造から設置後の動作確認、ティーチングやメンテナンスまで、業務の飛躍的な効率化を実現します。
