KV-Xシリーズ
お客様導入事例日東精工株式会社

高速タクトかつ低推力でのねじ締めを実現できたポイントは、KVシリーズでした。
日東精工様は、ねじ締結技術を中核とする総合メーカで、ねじ成形品、ねじ締め装置、産業用ロボット、計測・検査装置などを開発・製造されています。
FA分野や自動車、電子機器、住宅設備など幅広い産業に対して高品質なソリューションを提供し、生産現場の自動化・効率化に貢献しています。
また、海外拠点を有し、グローバルに事業を展開しています。
- 産機事業本部のお仕事内容を教えてください。
単体機から大規模な製造ラインまで製造されている。
ナットランナ、ねじ締めユニット、ねじ締めロボットを中心に自動化・省力化装置の開発、設計、製作をおこなっています。
ねじ締めユニットはナットランナにビットや昇降機構を組み合わせたもので、ねじ締めロボットはパッケージ化したシステムです。
ねじ締めロボットは、ねじ締めユニットにロボットのスライド軸や旋回軸、ねじ供給機を組み合わせた構成になります。
単体機から大規模な製造ラインまで、幅広く手掛けています。
日東精工様のねじ締めノウハウ

ねじ供給から、ねじ締めユニットまでが一体となったシステムを
自社開発されている。
当社は国産初の自動ねじ締め機を手がけたパイオニアとして、自動車関連や電子デバイスのお客様をはじめ、住宅・建築・エネルギー業界など幅広い分野でご採用いただいています。
当社は、ねじを回すナットランナに加え、ロボットやねじ供給機などねじ締めに関連する製品群も手掛けています。
特長としては、これらの関連製品は単に既製品を組み合わせるのではなく、すべて自社開発によりシステム構築している点です。
このように当社は、ねじ締めシステムを自社で一貫して構築し、独自のノウハウを長年にわたって蓄積しています。
- ねじ締めノウハウとは何か、具体的に教えていただけますか?
ねじ締め工程では低推力(押付力)のコントロールが重要になります。
たとえばワークが電子機器の場合では、ねじ締め時に過剰な推力を加えてしまうと、部品に負担がかかり、破損の原因になります。
そのため、ねじ締めトルクだけでなく、この推力をどうやって低くしていくかがねじ締め機では非常に重要な要素になるんです。
一般的にねじ締め機にはいくつかの種類があります。
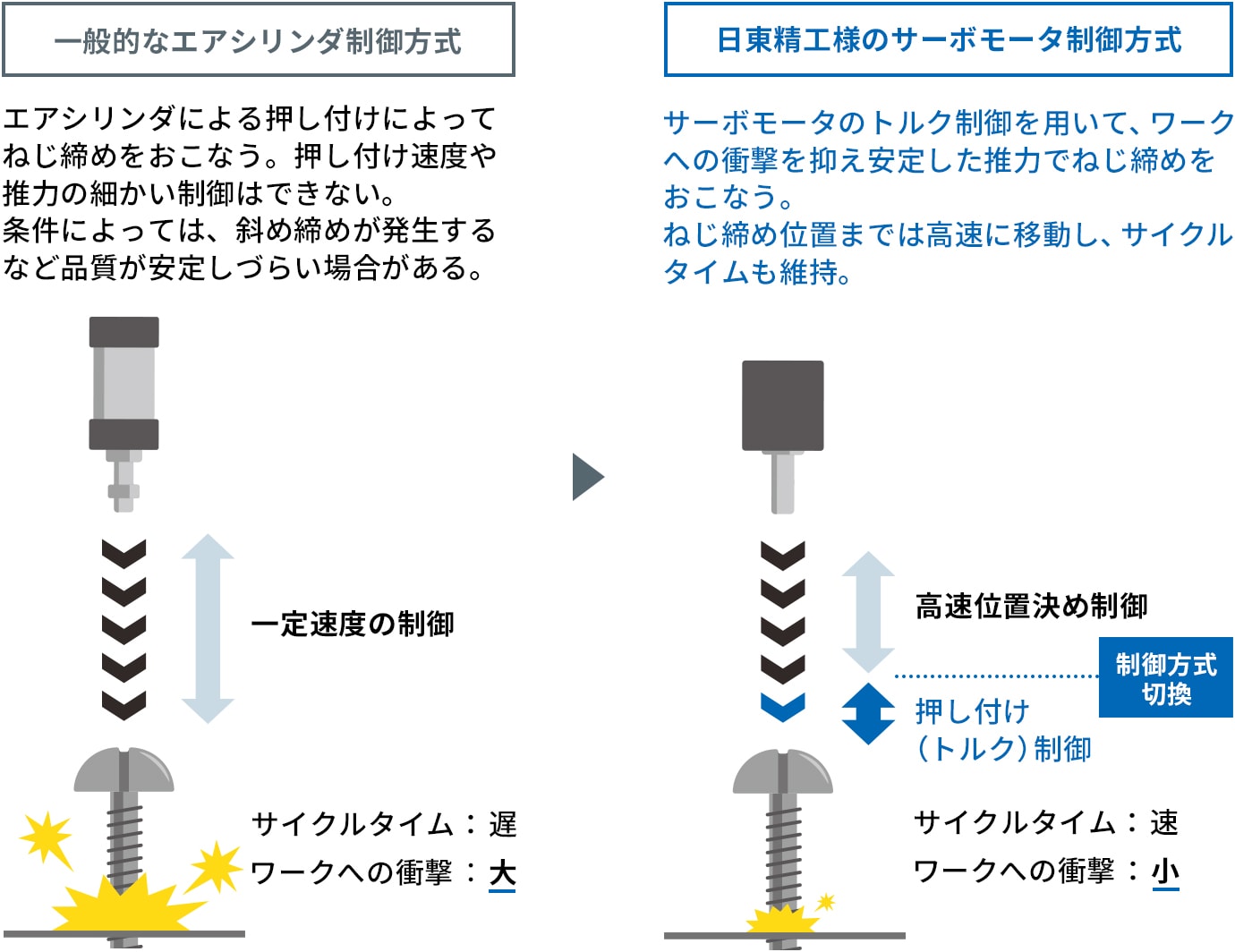
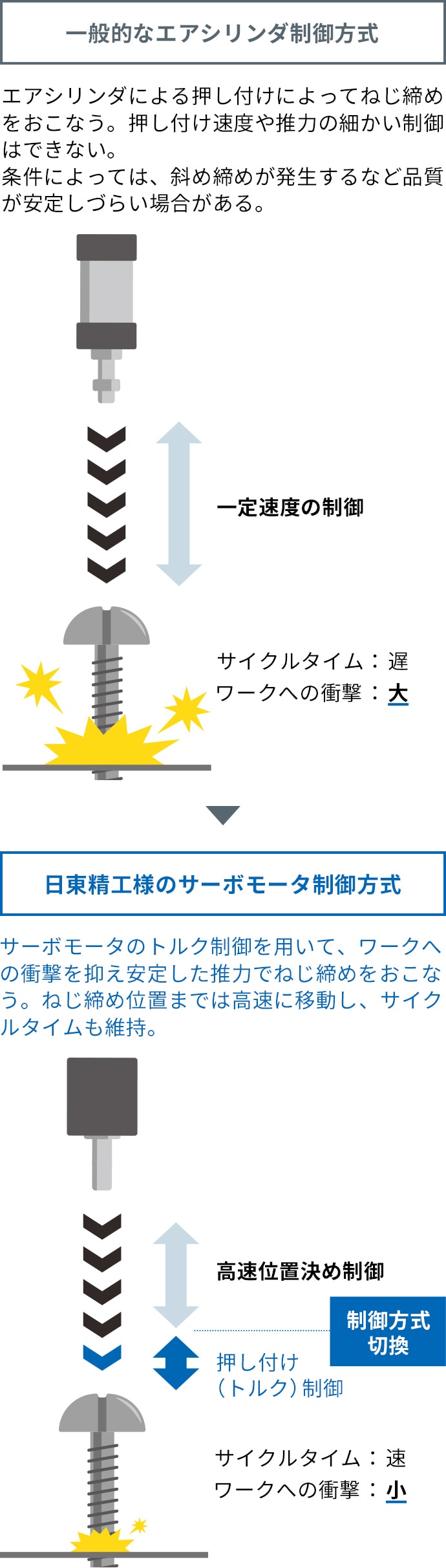
代表的なものとして、エアシリンダで動作するねじ締め機と、サーボモータを使用したねじ締め機があげられます。
エアシリンダ制御方式のねじ締め機はシンプルで低コストですが、速度や推力を細かく制御することができません。
対してサーボモータを使用したねじ締め機では、人間の手で締める感覚を再現することで、サイクルタイムの高速化とワークへの負荷軽減を高い水準で両立しています。
- “人間の手で締める感覚”とは具体的にどのようなものでしょうか?
サーボモータで人間に似た繊細な制御
たとえば、ドライバでねじを締める場面を想像してください。
ドライバの十字がねじから外れないように、かつ押さえ過ぎてワークを傷めることのないように、指や手首の力で“軽く押しつけながら、手の感覚で止める”このような感覚でねじを締めるはずです。
当社の製作する装置は、このように人がおこなうねじ締め動作を実現するよう設計されています。
ねじ締め機の推力を最小限にすることで、それらの不良発生リスクを低減しねじ締め品質を向上させることができます。
- 数あるPLCの中からKVシリーズを選んでいただいた理由を教えてください。
KVシリーズを選んだ理由
当社のシステムでは、位置決め制御と押し付け(トルク制御)組み合わせ、ねじ締め位置を調整することで押し込み量をコントロールしています。
また、サーボモータでトルク管理もおこなっています。
ワークへの負荷をさらに低減するにはこれまで以上に押し込む力を下げる必要があります。
つまり、“超低推力”の実現が重要になります。
そのためには、KVシリーズのトルク制御が必要不可欠でした。
- KVシリーズのトルク制御はどの点でお役に立てていますか?
KVのトルク制御で、“超低推力”のねじ締め
ねじ締めユニットの昇降機構部の自重(ユニット自身の重み)を相殺する制御です。
“低推力”でのねじ締めを実現する方法として、単純に荷重センサを追加する手段もあります。
しかし、荷重センサはコストが高く、破損リスクもあり、周辺構造も複雑化します。
そこで、KVシリーズの性能を活かして荷重センサレスで“低推力”ねじ締めを実現できないか検討しました。

秘訣を熱心に語っていただいた。
推力に大きく影響する要素の一つが、ねじ締めユニットの昇降機構部の自重です。
サーボモータのトルク制御を用いて昇降機構部の自重を相殺することで、“低推力”でのねじ締めが可能になりました。
ねじ締め動作では、サーボモータの位置制御とトルク制御を切り替える必要がありますが、KVシリーズはこの切り替えを1制御周期で実行でき、スキャンタイム自体も高速です。
以上の理由から、“超低推力”かつ“サイクルタイム短縮”が見込めると判断し、KVシリーズを採用しました。
- “自重を相殺する”とはどのような内容でしょうか?
ねじ締め推力を最大70%軽減
従来はモータの推力に加え昇降機構の自重分がワークにかかるため、推力が変動し、推力を一定以下に小さくすることができませんでした。
当社の仕組みでは、この自重分に相当するトルクを自動で算出し、打ち消す方向の力をかけることで“自重を相殺(実質自重ゼロ)”しています。
この制御方式により、当社従来比で最大約70%の推力軽減を達成しています。
- サイクルタイム削減はどのように実現されたのでしょうか?
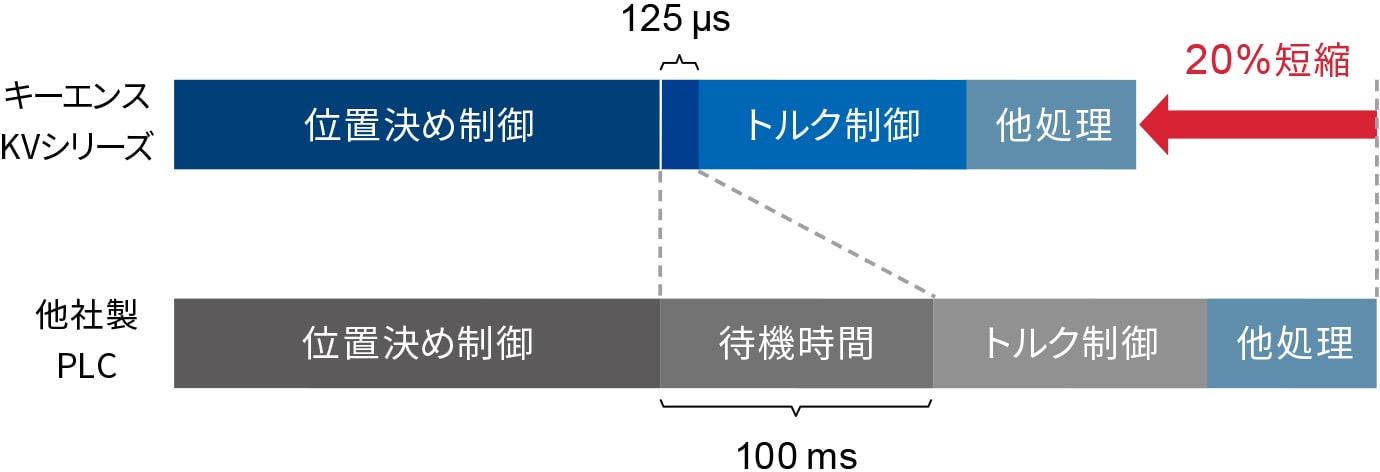
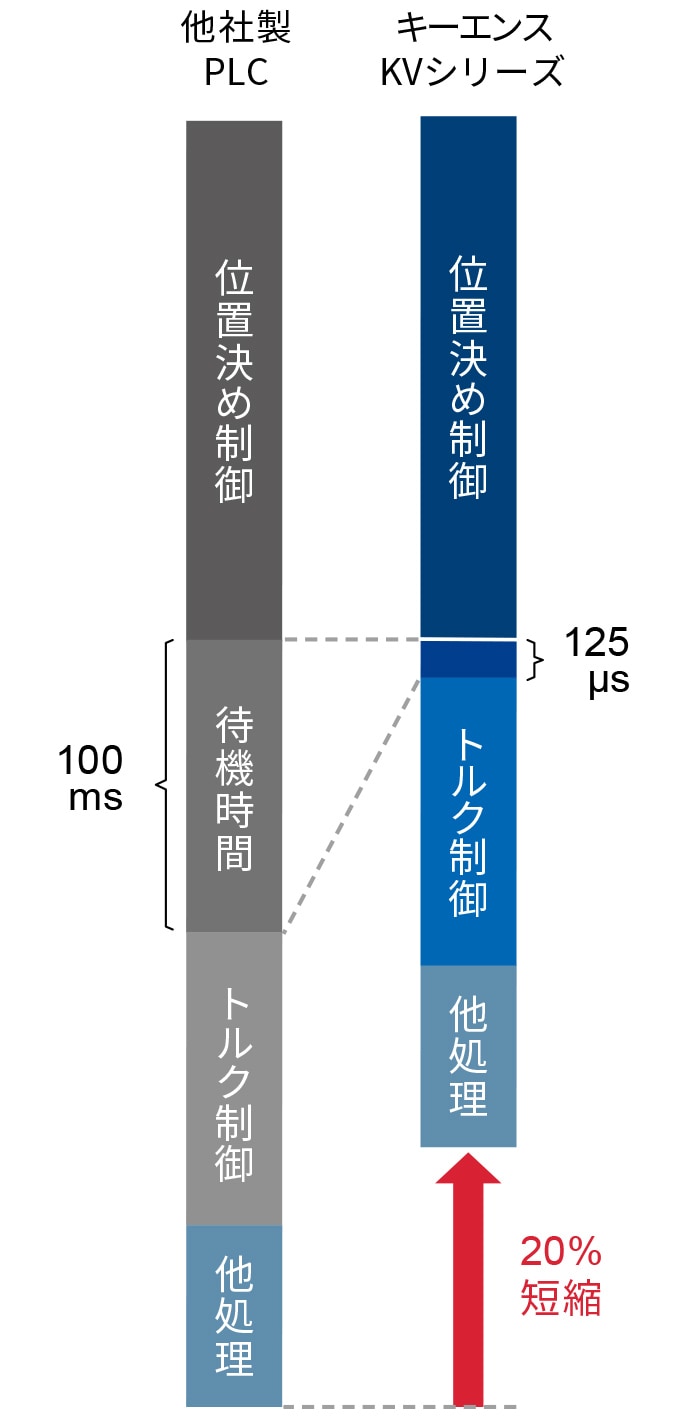
サイクルタイムを最大約20%短縮
位置決め制御とトルク制御の切り替え速度が重要なポイントです。
KVシリーズでは、1制御周期で位置決め制御からトルク制御に切り替えできるため、制御方式の切り替えによる待機時間を大幅に短縮できました。
他にも、従来必要だった偏差処理を無くしたり、ねじ浮き検出に掛かる時間を縮める制御上の工夫なども合わせて、サイクルタイムの短縮につながりました。
- 制御方式の変更へのハードルをどう乗り越えたのでしょうか?
装置性能とユーザビリティの両立

装置性能には一切妥協せず、市場で求められる以上の機能や使い勝手を実現することは当然ながら難易度が高い課題でした。
今回、新規開発するにあたり、装置性能だけでなくユーザビリティも重視しました。
たとえば、従来は推力をパーセント単位で扱っていましたが、実際の推力の狙い値を直接N(ニュートン)単位で設定できるように変更し、より直感的にティーチング作業をおこなえるようにしました。
また、搭載部品点数を増やさないことにも注力しました。
仮に荷重センサを採用したとすると、直接的なコストも大きく増大してしまいますが、それ以外にセンサの校正が必要になることも多く、お客様の管理工数とコストの増大につながります。
そのため、お客様に余計な工数やコストをかけさせずに“超低推力”を実現することにはこだわりました。
- 今後、御社製品はどう進化していくのでしょうか?
装置のさらなる進化
製品の小型化が進む中、部品の薄肉化やねじ径の小型化などにより、ねじ締めの条件は一層厳しくなっています。
そのため、“超低推力”でねじ締めをおこなう重要性は今後さらに高まると考えています。
また、大手企業に対して温室効果ガス排出量のScope3開示が義務化されるなど、これまで以上に環境配慮が求められています。
ねじ締め不良を限りなくゼロに近づけることや、サイクルタイムを短縮することは環境面の観点でも重要です。
今後も低推力化とサイクルタイム短縮を両立させ、さらに進化させていきます。
- 新商品KV-Xに期待していることはありますか?
KV-Xに期待している内容

推力制御に直結する、モーション制御やスキャンタイムのさらなる高速化に期待しています。
またシミュレータ、リアルタイムチャートモニタやドライブレコーダなどのツールも充実していますので、さらに効率のよい開発がおこなえると感じています。
特にドライブレコーダは、従来よりも処理時間が大幅に短くなるとのことですので、活用できる機会が広がると思っていまして、今から楽しみにしています。
- KV STUDIOの使い勝手はいかがでしょうか?
ファンクションブロックのオブジェクト化(ファンクションブロックをブラックボックス化する機能。
作成者以外は中身のロジックを確認できなくなる。)は非常に有益でした。
装置開発の担当者は、プログラム流出を懸念してパスワードを設定することがありますが、そのパスワード管理は大変です。
ファンクションブロックの中身が見られなくなるという点は、海外に装置を出荷しているメーカにとって大きな安心材料です。
キーエンスさんはユーザーの要望を的確に抽出してくれる点が優れていると感じますね。
- KVシリーズの世界標準プログラムへの進化に関して印象を教えてください。
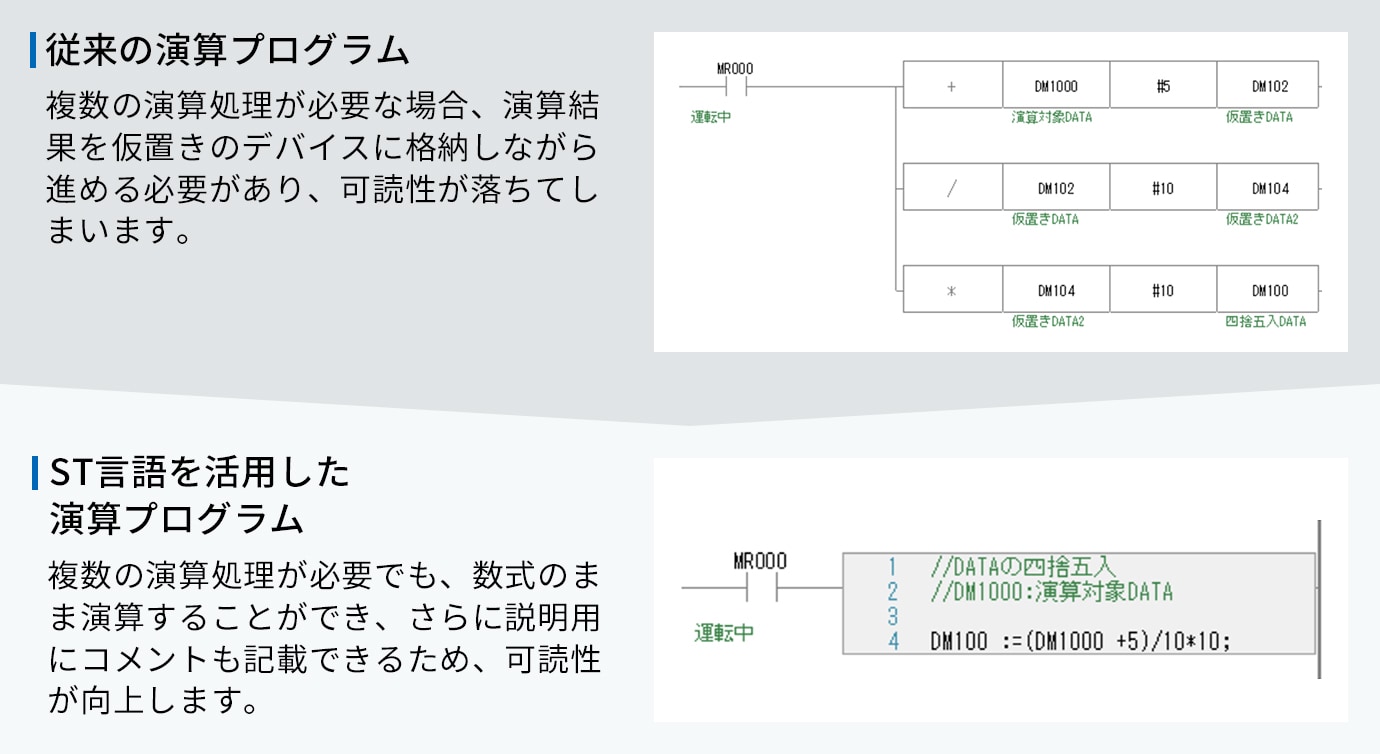
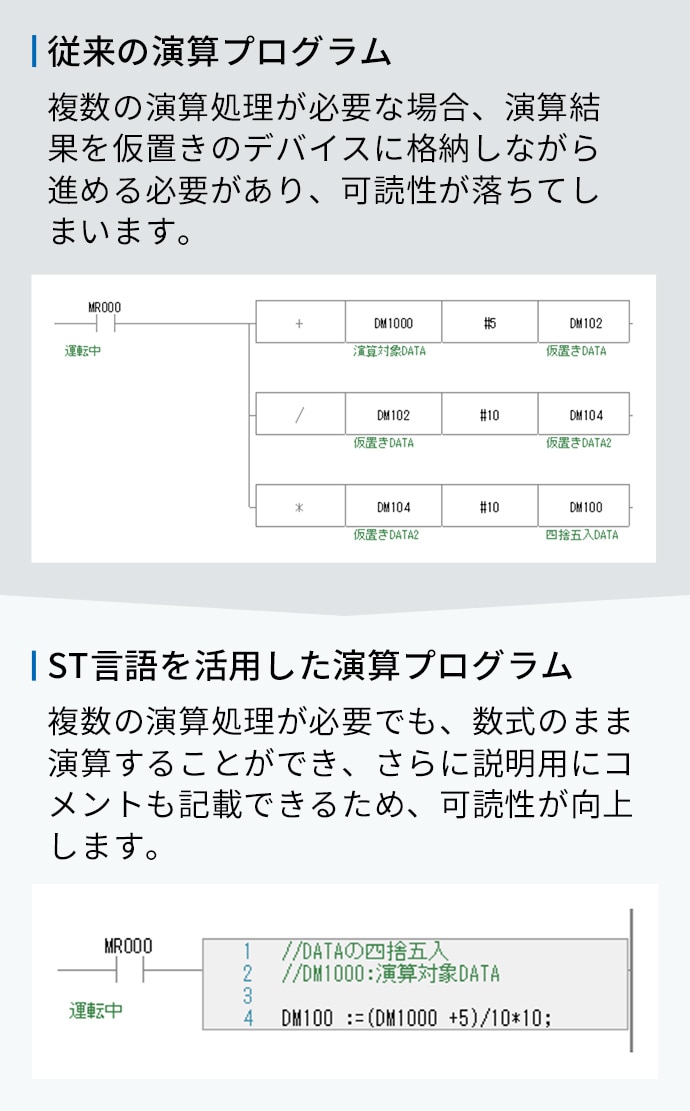
当社では、プログラム記述の高速化を図るため、ST言語での記述も採用しています。
複雑な演算処理を簡潔に書け、可読性や流用性も高まりますし、構文チェックや入力補完などの支援機能と合わせてストレスなくプログラムを作成できます。
また、ラダープログラムを併用する際には、最近バージョンアップされたフリーデザイン方式の使い勝手が良く、とても気に入っています。
- フリーデザイン方式のどのような点が良かったでしょうか?
何よりも、変数が見切れない点が重要です。
ST言語ではテキストをそのまま記述するので見切れることはありませんでしたが、ラダープログラムでの記述では見切れてしまいます。
変数が見切れてしまいますとデバッグする際、動作を追いづらいのです。
これがすべて確認できるのでフリーデザイン方式はありがたいですね。
- 生成AIの問い合わせ対応※に関して教えてください。
とても便利です。
一般的な生成AIではPLC関連の問い合わせに適切に回答してくれないことが多いのですが、キーエンス様の生成AIはよくチューニングされていますよね。
※キーエンスHPの生成AIチャットボットサービス
https://www.keyence.co.jp/controls_ai-assistant/
マニュアルを見なくても適切な回答を得られるため大変役に立っています。
最先端を走っているという印象で、感服しました。
- キーエンスに対してメッセージをお願いします。
最後に
商品はもちろんサポート体制も充実しており、レスポンスも迅速です。
KVを初めて採用した際には、営業担当の方が同行して1日かけて使い方を丁寧にレクチャーしてくださったことが印象に残っています。
時代の最先端を行くメーカであり、今後も高い水準での活動を継続して欲しいですね。
私たちもKVシリーズを活用してさらなる低推力化・サイクルタイムの短縮を目指していきます。
関連商品




日東精工株式会社様は1938年設立、京都府綾部市に本社を置く精密ねじ・自動ねじ締め機・検査機器・流量計などを手掛けるメーカです。
国内外に生産拠点・販売拠点を持ち、微細ねじの量産や一貫した自動組立ソリューション、高精度技術と研究開発力を強みとしています。
FA分野や自動車、電子機器、住宅設備など幅広い産業に対して高品質なソリューションを提供し、生産現場の自動化・効率化を支えています。
- この事例に記述した数字・内容は事例取材当時に発表されていた事実に基づきます。

ほかのカスタマーボイスを見る