[セーフティレーザスキャナ SZ-Vシリーズ]
協働ロボットとはいえ、作業者と衝突した場合のリスクを許容できないことは多々あります。協働ロボットの有効利用には、省スペースと作業性を確保しつつも妥協のない安全防護が必要です。
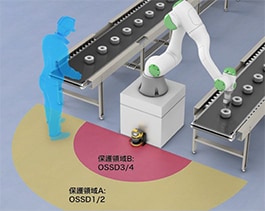
下記の図を例に説明すると、自身の位置情報や速度を適切な安全機能で監視している協働ロボットの場合、
・作業者がロボットに近づく(保護領域A)→ロボットが減速し、衝突のリスクが低減される。
・衝突のリスクの高い範囲に入る(保護領域B)→ロボットが保護停止状態となる。
・保護領域B内での作業中→ロボットの再起動不可。
・作業者が保護領域Bから出る→自動でロボットが再起動する。(低速動作)
という制御が可能です。
キーエンスのSZ-Vシリーズは1台で2つの保護領域を設定することができます。この機能を使うと、保護領域Aでロボットが減速し、保護領域Bでロボットが保護停止するという制御が可能です。さらに、作業者が保護領域Bの外に出るまで、ロボットの再起動を許可しないという制御も可能なため、作業性に配慮した安全防護を簡単に実現できます。
※上図はレーザスキャナの設置イメージであり、システム全体として適切な保護方策が実施されている事例ではありません。
[画像処理システム CV-Xシリーズ/XG-Xシリーズ]
ロボットビジョンシステムを活用し、コンベアを流れる製品のピッキングを自動化できます。通常のロボットでは、「位置ずれがあるとピッキングできない」「変形しやすい製品を正確にピッキングできない」という問題がありましたが、コンベアを流れる製品をカメラで検出し、向きなどを判別してピッキングすることで、多品種混合のコンベアにも対応できます。また、ワーク検出用カメラで画像検査も同時におこなえるため、より効率的なライン設計が可能です。

[3Dロボットビジョンシステム CV-X480D/RB]
産業用ロボットの利用が拡大しているピッキング作業ですが、従来の産業用ロボットは座標制御のためワークの位置ずれなどに対応できませんでした。そこであらかじめ治具にセットしたり、トレーに部品を整列させたりといった手間がかかっていました。しかし、3Dロボットビジョンシステムを活用すれば、バラ積みになった製品を認識し、ランダムピッキングすることが可能です。
またCV-X480Dならば、従来非常に手間であったロボットの経路設計も自動で最適化。動作検証もシミュレーションソフト上で簡単におこなえます。

[超高精細インラインプロファイル測定器 LJ-X8000シリーズ]
「溶接」はロボット活用が進んでいる工程の一つですが、同時にしっかりとした検査が必要な工程でもあります。ロボット先端の溶接トーチの後を追うようにセンサヘッドを動かすことで、インラインでの全数自動検査を実現できます。形状から良否を判断するため、色ムラによる誤検知をなくすことができました。また従来は、取得したビードの形状データを用いて溶接品質の検査をおこなうには、複雑な設定や演算処理が必要でしたが、LJ-X8000シリーズなら専用ツールで簡単に設定できます。

[3-Axisハイブリッドレーザマーカ MD-Xシリーズ]
ロボットでのハンドリング中にレーザマーキングが可能です。レーザマーカは焦点を絞って印字するという構造上、一般的にシビアな位置あわせが求められます。しかしMD-Xシリーズは測距センサを内蔵しているため、ワークの位置ずれに対して、自動で焦点距離を補正。ロボット搬送時にも安定した印字が可能です。

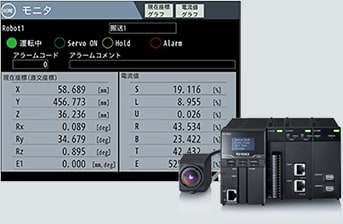
[プログラマブルコントローラ KV-8000シリーズ]
ロボットの安定稼働には、状態把握が非常に大切です。KV-8000シリーズは各社ロボットとの通信機能を備えており、動作状態を見える化できるアプリケーションを用意しています。運転状態、アラーム、現在座標、電流値などの情報の一括モニタリングが簡単に実現できます。このほかにも、点検時期のアラート発報など、ロボットの運用に役立つ各種アプリケーションを用意しています。
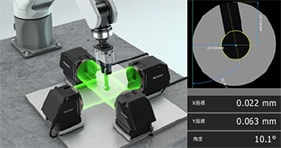
[インライン投影画像測定器 TM-X5000シリーズ]
ロボットが繰り返し同じ位置に移動した際の停止精度や、動きの定量化が可能です。TM-X5000シリーズは投受光両方にテレセントリックレンズを搭載。光の平行性を極めたことで、高い安定性と精度を実現しています。
またサンプリング周期ごとに計測値はもちろん計測画像もロギング。動的に変化する形状・寸法変化の計測や、 振れ・ストロークの測定などに活用できます。