
組立
複雑な作業が多い組立工程は、自動化が困難で職人の手に頼ってきました。しかし、産業用ロボットやロボットビジョンシステムの技術革新により、現在では着実に自動化が進んでいます。さらに多品種変量生産のセル生産にも産業用ロボットの活躍の場が広がっています。こちらでは組立工程におけるロボットビジョンシステムの具体的な活用事例、従来の課題と導入のメリットなどをご紹介します。

ネジ締め時の位置決め
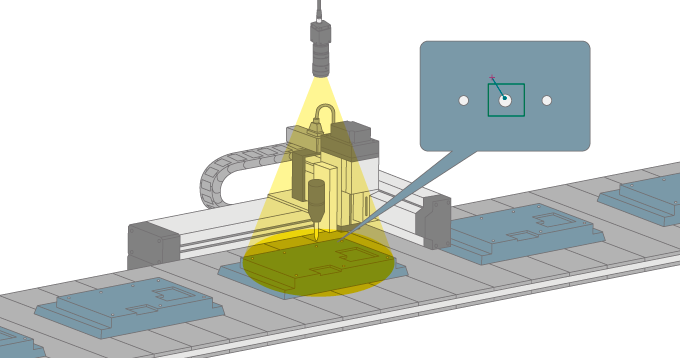
複雑な構造かつ多品種化が進んでいる現代の製品は、正確な位置決めが難しくネジ締付時の位置ずれが発生しやすくなっています。特にネジの呼び径10%を超える位置ずれは締付ミスにつながりやすく、その都度ティーチングを行っていたため生産性低下を招いていました。そこでネジ締め時の位置ずれを防止するためにロボットビジョンシステムを導入した事例がこちらです。シンプルな直交ロボットにカメラを取り付け、ネジとネジ穴のずれに対して位置補正を加えています。これによりネジ締め工程の高精度化・自動化に加え、ティーチングの負担軽減、生産効率アップ、多品種生産への対応などが可能になりました。
キーエンスロボットビジョンシステムは、多くの産業用ロボットに直接接続できるので、既存の生産ラインに簡単に追加可能です。ワンクリックで誰が操作しても迅速かつ高精度な立ち上げが可能な「オートキャリブレーション」に加え、強力なサーチツールにより精度が要求される作業にも対応しています。

液体ガスケット(FIPG)の塗布位置補正
自動車のエンジンやトランスミッション、オイルパン、ガソリンタンクなどは、密閉性を高めるために液体ガスケット(FIPG/シーリング剤)を塗布します。この液体ガスケット(FIPG/シーリング剤)の塗布位置にずれが発生するとオイルやガソリン漏れの原因になります。塗布位置の確認を自動化し、品質の安定化を図るためにロボットビジョンシステムを導入した事例では、シール材の塗布位置確認に加え、リアルタイムで位置補正を行うことで正確な塗布を実現。同時に画像検査でシール材の途切れ、太りや細りといった不具合も正確に判別できるので品質の安定にも効果的です。
キーエンスのロボットビジョンシステムは、31万画素〜2100万画素まで豊富なカメラをラインナップし、ロボットメーカー各社の標準コントローラに接続できます。また、専用のインターフェースから動作フローを設定するだけでプログラム作成できるので導入しやすいことがメリットです。

セルロボットによるコンセントの組立
2台の垂直多関節ロボットとロボットビジョンシステムを活用したコンセント組立ロボットセルの事例です。従来、複数作業を行うセル生産の自動化は困難でしたが、産業用ロボットの進化に加え、ロボットビジョンシステムや力覚センサの発達などで可能になっています。例えばコンセント組み立て工程では、ロボットに多機能ハンドを装着し、カメラで部品を認識しながらワークの把持からネジ締めまで自動化。従来であれば人間が作業していた工程を完全にロボットに置き換えることで省人化を実現し、作業の効率化を図っています。さらにカメラを増設することで、組立作業と同時に外観検査も実施でき、検査工程の省人化・作業効率アップにも効果的です。
通常、このような複雑な作業はプログラミングの知識が必要不可欠でしたが、キーエンスのロボットビジョンシステムはフローに従って設定するだけでさまざまな動作が可能な簡単インターフェースを採用しているので導入しやすくなっています。サンプルプログラム作成機能なども備わっているので、はじめてロボットビジョンシステムを導入する場合でも安心して使用いただけます。



