ロボット周辺への作業者の侵入を検知するためにセンサを設置する場合、搬送車(通過させなければならない物体)は検知しない機能が必要です。つまり、搬送車が通過した際には異常とならず、作業者など搬送車以外の物体が侵入した場合には異常と判断し、ロボットを止めるといった安全対策が必要です。
安全対策のポイント
- ラインを止めずに侵入検知
- 搬送車の通過時→ロボットは停止しない。作業者など搬送車以外の物体が通過すると停止する。
- ロボット動作中は、安全柵のドアをロック。
- 異常発生時はロボットを停止する→ドアロックを解除(インターロック) 。
- 柵内作業中→ロボット起動不可。
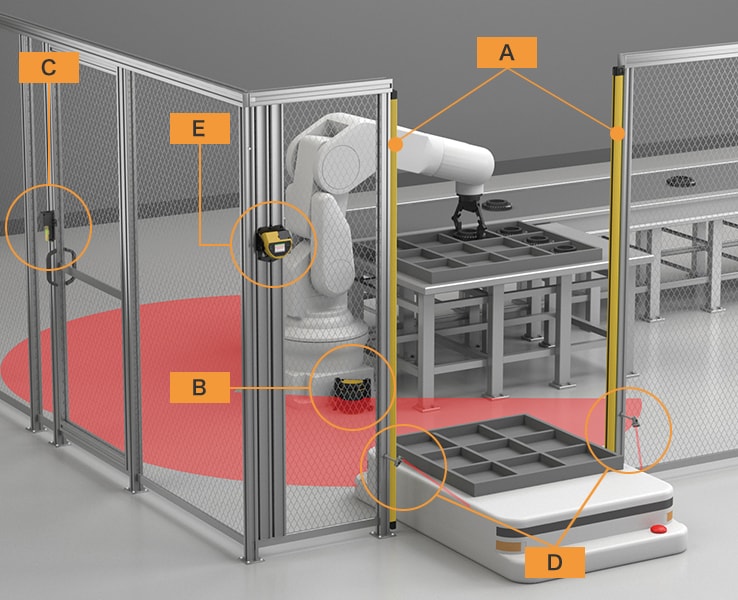
B:セーフティレーザスキャナ(SZ-Vシリーズ)
C:セーフティドアセンサ(GS-50シリーズ)
D:アンプ内蔵型光電センサ(PR-Gシリーズ)
E:セーフティレーザスキャナ(SZ-Vシリーズ:表示部)
キーエンスからのご提案
- ロボットを停止させずに作業者の安全を確保
- 安全柵のドアにスプリングロック方式のセーフティドアセンサを設置し、ロボット動作中の作業者の侵入を防ぎます。
- 搬送車の位置は、アンプ内蔵型光電センサ「PR-Gシリーズ」で検出します(位置センサ)。
- 搬送車通過時は、セーフティライトカーテンの「ミューティング機能」で、光軸を無効にします。搬送車が通過してもロボットは止まりません。
- 活用のヒント
- ロボットを停止し、柵内に作業者が入ると、セーフティレーザスキャナが作業者を検知。柵内に作業者が居る間、ロボットの再起動を許可しません。
セーフティライトカーテンには、特定の光軸のみ有効または無効にする「部分ミューティング」や「フィックスブランキング」といった機能があります。これらの機能を設定することで、多彩な条件に適応した安全対策が可能になります。
最新の安全機器をカタログで詳しくご紹介します。
ダウンロードしてご確認ください。


- ミューティング機能
- ワークが通過する場合に、セーフティライトカーテンの安全機能を一時的に無効化する機能です。1台のセーフティライトカーテンに、2台のミューティングセンサ(位置センサ)を設置します。2台のミューティングセンサが、特定の順番や時間差で反応するとワークとみなし、セーフティライトカーテンをミューティング状態にします。
-
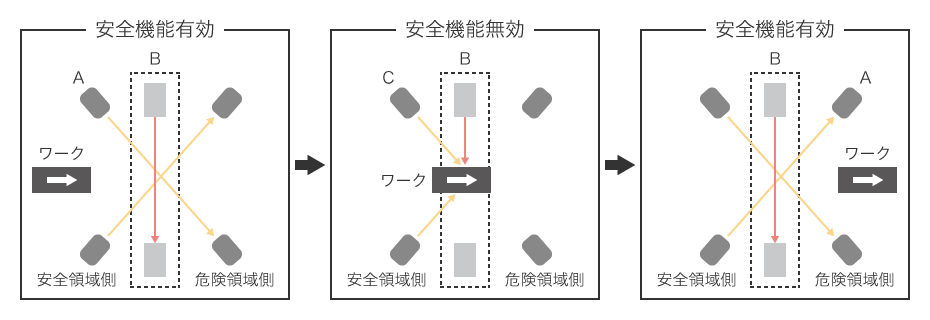
- A:ミューティングセンサ入光
B:セーフティライトカーテン
C:ミューティングセンサ遮光
- 事例を探す
- 侵入を検知する事例
- 存在を検知する事例
- 侵入と存在両方
を検知する事例
導入事例をまとめてダウンロード
安全対策をご検討の方必見!「機械安全」を実現する安全装置の導入事例を、"危険源への侵入の検知"と"危険区域の存在の検知"を中心に、わかりやすくご紹介します。
PDFで詳しく見る- 安全機器の商品一覧



