クラス最速の高速性
超高速演算と自律分散制御で最速モーション
モーション制御の中で負荷の大きい内部演算を高速処理するために「1GHz Dual Core SoC」を搭載し、制御周期125μs/5軸を実現。さらにユニットが自律してプログラム実行することで、高速・高精度なモーション制御を可能にしました。
詳細をカタログで見る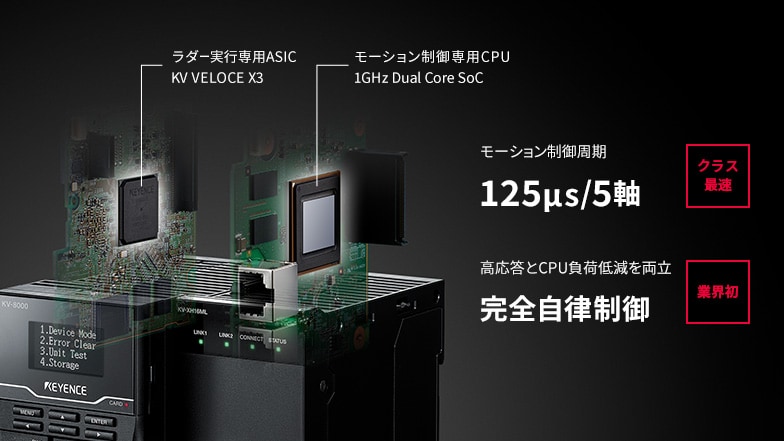
クラス最高の同時性
PLCシステムからサーボアンプまですべて同期
ユニットの内部周期の開始タイミングを調整することで、ユニット間でのばらつき1μs以下の同時性を実現。ユニット間同期でサーボアンプとの通信だけでなく、内部の制御周期まで同期でき、PLCに入力されたアナログや高速パルスのデータ変化に対して、高精度にモータを同期・追従できます。
詳細をカタログで見る
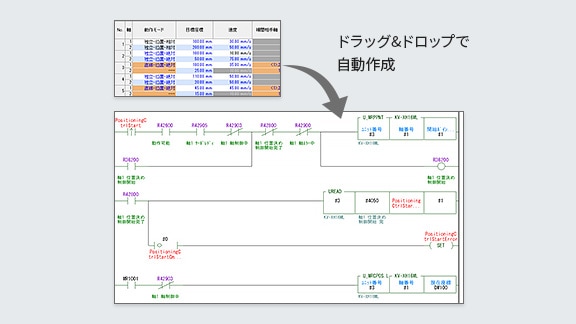
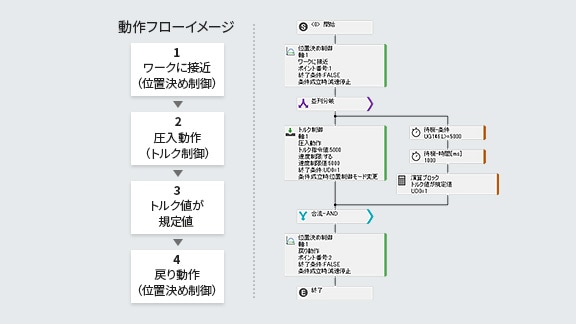
選べるプログラム言語
ラダー、フロー、C言語から自由に選択
位置決め開始や原点復帰プログラムなど、位置決め制御で必要となるプログラムをドラッグ&ドロップで自動生成可能。さらに、ラダープログラムで煩雑になりがちな連続動作や条件分岐などの動作をフロー形式で直感的に記述でき、複雑なロボット制御などに関してはC言語でも記述できます。お客様が使いやすい言語を自由に選択できる新たなご提案です。