ライトカーテンの設置と安全距離
セーフティライトカーテンなどの電気的検知保護設備を設置する場合、人体が検出領域に侵入し、危険区域に到達する前に機械が停止するために必要な最小距離がISO13855等の規格により規定されています。ライトカーテンを設置する際には、使用する国または地域の規格、規制または法律等により定められる安全距離(最小距離)を必ず確保したうえで設置してください。
ここでは、ライトカーテンの設置と安全距離について説明します。
ISO13855に基づく安全距離の計算方法
安全距離(S)=人体の接近速度×応答時間+センサの検知能力による追加距離
垂直方向接近
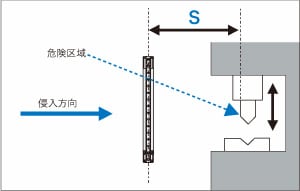
- 人体の検出
- S=K×T+C 40<d≦70
- K=1600mm/秒《接近速度(人体の歩行速度を想定)》
T=機械の最大停止時間+ライトカーテンの応答時間
C=850mm《侵入距離(標準的な腕の長さとされる値)》 - 指・手の検出
- S=K×T+8(d-14) d≦40
-
K=2000mm/秒《接近速度(手の侵入速度を想定)》
T=機械の最大停止時間+ライトカーテンの応答時間
d=ライトカーテンの最小検出物体値注:S≧500mmの場合、K=1,600で再計算し、その計算結果がS≦500mmとなった場合、S=500mm
機械の最大停止時間と安全距離の関係
計算式で表されるTは、下記2つのパラメータの足し算で表されます。
T=「機械の最大停止時間」+「ライトカーテンの応答時間(ON→OFF)」
K(侵入速度)=2000mm/秒とした場合
例えばライトカーテン:GL-R08H(応答時間は0.0069秒)を使用すると
S=2000mm/秒×(機械の最大停止時間+0.0069秒)+Cとなります。
上記のように機械の最大停止時間は侵入速度(2000mm/秒)にかかっているため最大停止時間が仮に「1秒」追加になった場合、安全距離は「2000mm/秒×1秒」=「2000mm」追加となります。ライトカーテンの応答時間が「1ms」追加になった場合、安全距離は「2mm」追加となります。

具体的な計算例
垂直方向からの接近:GL-Rシリーズの場合
公式:S=K×T+C
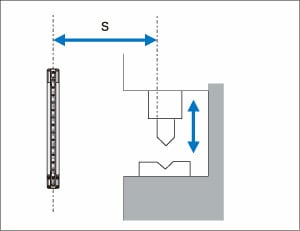
- S:最小距離(mm)(左図参照)ただし、S≧100mm
- K:人体の接近速度に基づくデータから抽出されたパラメータ(mm/秒)
- T:総合システム停止性能(秒)
T=t1(GL-R シリーズの最大応答時間)+t2(機械の最大停止時間) - C:侵入距離(mm)
d≦40 の場合…8×(d-14)ただし、c≧0
40<d≦70 の場合…850 - d:GL-R シリーズの最小検出体(mm)
- 計算例1GL-R60H
(最小検出体d=25mm、光軸数60)使用時 -
条件:産業用の用途で使用
K=2000mm/秒
t1(GL-R60Hの応答時間)=0.0157 秒
t2(機械の最大停止時間)=0.1 秒
C=8×(25-14)=88mmS=K×T+C=2000×(0.1157)+88=319.4mm
S>500mmとなった場合は、K=1600mm/秒として再計算を行ないます。再計算結果がS≦500となる場合は、S=500を採用します。
- 計算例2GL-R08L
(最小検出体d=45mm、光軸数8)使用時 -
条件:産業用の用途で使用
K=1600mm/秒
t1(GL-R08Lの応答時間)=0.0069 秒
t2(機械の最大停止時間)=0.1 秒
C=850mmS=K×T+C=1600×(0.1069)+850=1021.04mm
水平方向からの接近:GL-Rシリーズの場合
公式:S=K×T+C
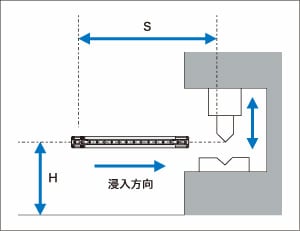
- S:最小距離(左図参照)
- K:人体の接近速度に基づくデータから抽出されたパラメータ(mm/秒)
- T:総合システム停止性能(秒)
T=t1(GL-R シリーズの最大応答時間)+t2(機械の最大停止時間) - C:侵入距離(mm)
C=1200-0.4H ただし、C≧850mm - H:基準面から検出領域までの高さ(mm)
15(d-50)≦H≦1000 ただし、H≧0
- 計算例GL-R30L
(最小検出体d=45mm、光軸数30)使用時 -
条件:産業用の用途で使用
K=1600mm/秒
T1(GL-R30Lの応答時間)=0.0105 秒
T2(機械の最大停止時間)=0.1 秒
H=200mm
C=1200-0.4×200=1120mmS=K×T+C=1600×(0.0105+0.1)+1120mm=1296.8mm
検出領域の上方を迂回する接近:GL-Rシリーズの場合
検出領域の上方を超えて危険区域へ接近することを防ぐことができない場合、これを考慮してライトカーテンの高さおよび最小距離Sを決定する必要があります。下記で計算されるSと「(1)垂直方向からの接近:GL-Rシリーズの場合」で計算されるSとを比較して、より大きな値を最小距離Sとしなければなりません。
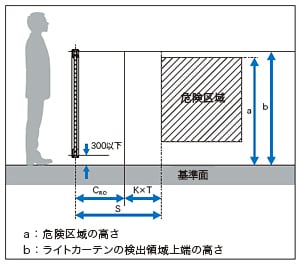
公式:S=K×T+CRO
- S:最小距離(mm)(左図参照) ただし、S≧100mm
- K:人体の接近速度に基づくデータから抽出されたパラメータ(mm/秒)
Kは、Sの値により以下の表のように決定されます。
| S(mm) | K(mm/秒) |
|---|---|
| 100≦S≦500 | 2000 |
| 500<S | 1600 |
CROはa(危険区域の高さ)とb(ライトカーテンの検出領域上端の高さ)の値により以下の表のように決定されます。
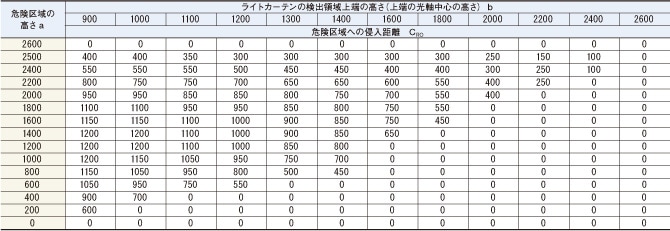
- ※1 迂回またはまたぎに対して十分な保護を提供できないため、検出領域上端が900mm未満の場合は含まれていません。
- ※2 検出領域下端が基準面から300mmを超える場合は、検出領域の下をくぐる接近に対して十分な保護を提供できません。
- 計算例1GL-R60H
(最小検出体d=25mm、光軸数60、検出高さ1180mm)使用 -
条件:産業用の用途で使用
a:(危険区域の高さ)=1400mm
b:(ライトカーテンの検出領域上端の高さ)=1180+300=1480mm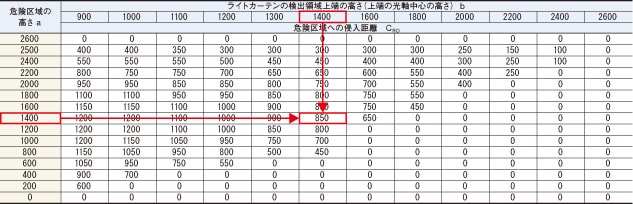
CROは、上表より850mmとなります。
(b=1480mmですので、1400と1600の間の数値となります。このような場合は、b=1400mmを採用します)
K=1600mm/秒
t1(GL-R60Hの応答時間)=0.0157 秒
t2(機械の最大停止時間)=0.1 秒S=K×T+CRO=1600×(0.1157)+850=1035.12mm(「(1)垂直方向からの接近:GL-R シリーズの場合」で計算したSより大きくなります)
- 計算例2GL-R60H
(最小検出体d=25mm、光軸数80、検出高さ1580mm)使用 -
条件:産業用の用途で使用
a:(危険区域の高さ)=1400mm
b:(ライトカーテンの検出領域上端の高さ)=1580+300=1880mm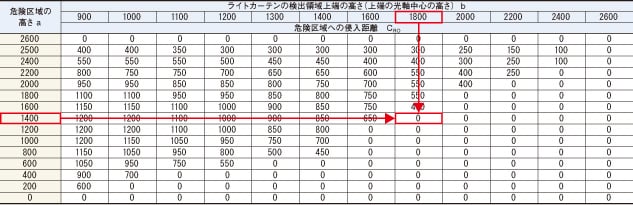
CROは、上表より0mmとなります。
(b=1880mmですので、1800と2000の間の数値となります。このような場合は、b=1800mmを採用します)
K=2000mm/秒
t1(GL-R80Hの応答時間)=0.0192 秒
t2(機械の最大停止時間)=0.1 秒S=K×T+CRO=2000×(0.1192)+0=238.4mm(「(1)垂直方向からの接近:GL-R シリーズの場合」で計算したSより小さくなります)

安全について
もっと知りたい方!
最新安全規格をまとめた、ブックレットを特別配信中!








