リンクの機構と種類
リンクは、組み合わせた複数の物体が相対的に動作する機械要素です。この2つの結合部を「対偶(ジョイント)」といい、対偶の組み合わせを「リンク機構」といいます。リンク機構は、この対偶を組み合わせて機械に必要な動作をさせます。そして、リンク機構を構成する各部品が「リンク」です。
ここでは、対偶の方法によってさまざまな構造を持ち、動作を実現するリンクの機構と種類を紹介します。
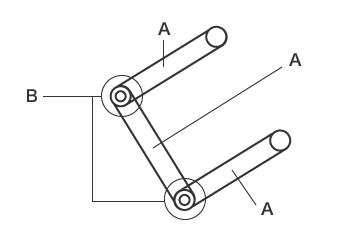
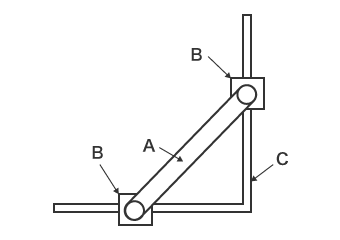
- A: リンク
- B: 対偶(ジョイント)

リンクの機構
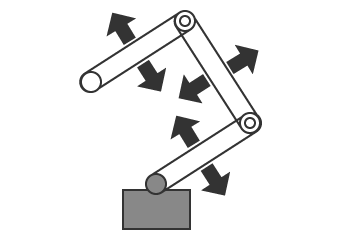
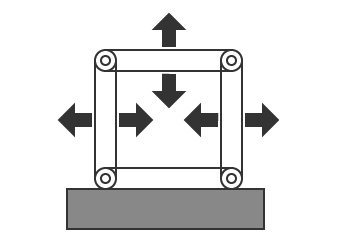
リンクの機構には、「オープンループ構造」と「クローズドループ構造」があります。オープンループ構造は、それぞれのジョイントにアクチュエータやセンサーを取り付け、自由度の高い動作を実現します。ロボットのマニュピュレータなどに利用されています。また、クローズドループ構造は、アクチュエータが1つのリンクを動かし、これに他のリンクが追従する構造です。家電製品や自動車部品に活用されています。

リンク機構と自由度
「自由度」とは、ある物体を動かすことができる方向の数のことです。たとえば、1本の軸の上で回転だけできる場合、自由度は「1」です。また、1本の軸の上で回転とスライドができる場合、自由度は「2」です。このように、動作の方向や種類が増えると自由度も増えていきます。
リンク機構の自由度は、以下の「グルーブラーの式」によって求めることができます。

- F:自由度
- n:リンク(節)の総数(可動リンク、固定部、スライド部を含む)
- J:対偶が持つ自由度「1」の総数
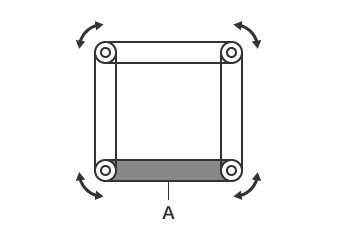
たとえば、以下のようなトラス構造を持つ3節リンクの場合、自由度は「0」です。リンク機構としては動作しません。このような構造を「固定連鎖」といいます。
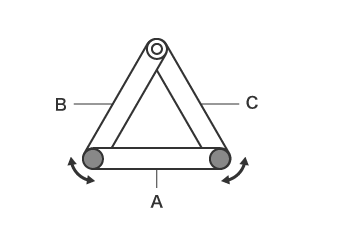
- A: リンク1(固定部)
- B: リンク2
- C: リンク3
また、以下のような多節リンクの場合、自由度は「1」です。リンク機構として動作します。このような構造を「限定連鎖」といいます。
さらに、5節リンク機構なら自由度は「2」になり、節の動作が複数であるという特徴を持ちます。このような構造を「不限定連鎖」といい、より複雑な動作が可能である一方、制御も複雑になります。
クローズドループ構造
リンクの機構には、オープンループ構造とクローズドループ構造がありますが、ここではクローズドループ構造の平面リンクを紹介します。クローズドループ構造の平面リンクには、主に以下の種類があります。
- 4節リンク機構
- スライダークランク機構
- 両スライダークランク機構
4節リンク機構
「4節リンク機構」とは、平面上で連結された4つの回転対偶で、そのうち1つを固定して得られる機構のことです。4節リンク機構は「グラスホフの定理*」によって成立します。
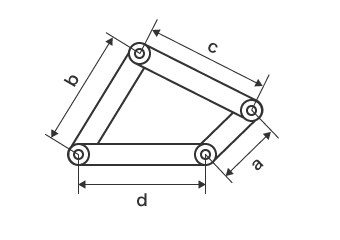
a:最短
- グラスホフの定理
- 「最短のリンク(節)と他の1つのリンク(節)の長さの和が、残りの2つのリンク(節)の長さの和より小さいか、等しい」
スライダークランク機構
「スライダークランク機構」とは、3つの回転する対偶と1つのスライドする対偶を連結したリンクで、そのうち1つが固定されている機構をいいます。
固定する位置によって、さまざまな機構を得ることができ、基本的にピンが長穴の中をスライドするタイプとブロックが軸上をスライドするタイプに分けられます。
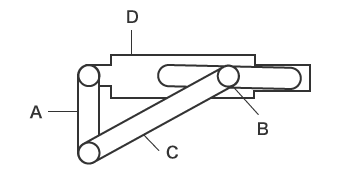
- A: リンクA
- B: リンクB(スライドピンB)
- C: リンクC
- D: リンクD
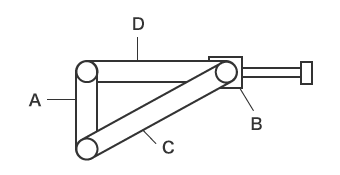
- A: リンクA
- B:リンクB(スライドジョイントB)
- C: リンクC
- D: リンクD
両スライダークランク機構
「両スライダークランク機構」とは、2つの回転すべり対偶を連結したリンクで、そのうち1つが固定されている機構をいいます。固定するリンクにより、
- 往復スライダークランク
- 固定両スライダークランク
- 回転スライダークランク
に分けられます。
- A: リンク
- B: スライドジョイント
- C: 直交リンク

