
MECHATROLINK-II
ここではMECHATROLINK-IIについて説明します。

概要
MECHATROLINK-IIとは株式会社安川電機により開発された、RS-485ベースのモーション制御用ネットワークです。仕様はMECHATROLINK協会により管理されています。
MECHATROLINKは1995年にオープン化されましたが、その後伝送速度の高速化(4Mbps→10Mbps)と、モーションコマンドの拡充を行なったMECHATROLINK-IIが開発されました。

配線方法と通信プロトコル
配線方法
汎用的なRS-485通信がベースとなっており、スレーブを数珠つなぎのバス接続で配線します。最大伝送距離は50m(リピータ使用時は100m)でケーブルの両端には終端抵抗が必要になります。通信速度は10Mbpsで、最小リンク周期は0.25msから設定できます。最大接続スレーブ台数は31台です。
通信プロトコル
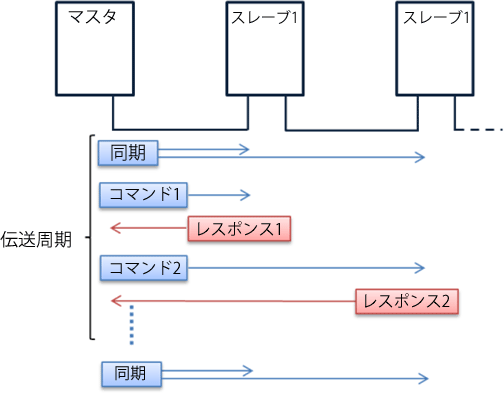
マスタ・スレーブ方式で通信します。マスタがスレーブに対して順番に、コマンドを送信し、スレーブからレスポンスを受信することで通信します。送受信された動作指令は伝送周期の同期タイミングで実行されます。
特徴
マスタが全スレーブと一定周期で通信するサイクリック通信に対応しています。
サイクリック通信機能
MECHATROLINK-IIで全スレーブに対して、一定周期かつ一斉に行なう通信です。通信周期は全スレーブで共通となります。通信エラーを検出した場合、伝送周期内でリトライ処理を実行できるため、ノイズなどによる通信エラーを防止しやすくなっています。データ長には17/32byteの設定がありますが、混在してサイクリック通信を行なうことはできません。
関連するネットワーク
MECHATROLINK-III
配線方法をイーサネットベースにしたモーション制御用ネットワークです。
- 記載されている会社名、製品名、ネットワーク名称などは、それぞれ各社の商標または登録商標です。
- 内容の一部(規格、仕様など)については記載当時から変更されている場合がありますのでご注意ください。
2015年11月
- 関連サイト
-


-



