
Motionnet
ここではMotionnetについて説明します。

概要
日本パルスモーター株式会社が開発した各種シリアル通信LSI:G9000シリーズを、RS-485で接続することで、I/O制御、モーション制御、データ制御が可能なフィールドバスです。
制御内容に応じてローカル側のLSIを組み合わせることで、様々な制御に対応できます。
Motionnetを構成するLSI:G9000シリーズ
| 品名 | 型式 | 概略仕様 | |
|---|---|---|---|
| センター | センターLSI | G9001A | パラレルバス 8または16Bitデーターバス |
| ローカル | 32点I/O制御LSI | G9002A | 32点I/O制御LSI |
| I/O制御LSI | G9205A | ポート間通信機能を持ったI/O制御LSI | |
| モーター制御LSI | G9103C | 1軸モーター制御LSI | |
| CPUエミュレーションLSI | G9004A | CPUエミュレーション、メッセージ通信 | |
| 拡張機能LSI | G9006 | I/O通信状態モニター、CPU間通信 | |
| ハブ | HUB LSI | G9H50A | Motionnet通信HUB |
配線方法と通信プロトコル
配線方法
RS-485、半二重通信を使用しディジーチェーンで配線します。センター及びローカルのRS-485トランシーバーの外部接続側にパルストランスを用いており、電源が入っている状態での信号線の活線挿抜にも対応しています。
通信プロトコル
リクエスト・レスポンス方式を採用しており、フレーム間にデータが存在しないことを確認して(最大3.7μs以内に)次のフレームが送出することで回線を効率的に使用しています。
特徴
ネットワークには一つのセンターLSIを搭載した機器とローカルLSIを搭載した機器が存在し、センターLSIがローカルLSIとの通信をコントロールしています。一定周期で通信するサイクリック通信と任意のタイミングで通信するトランジェント通信に対応しています。
最大接続台数
センターLSI、G9001Aは、最大64個のローカルLSIが接続できます。
そのため、64個すべてをI/O制御LSI:G9002Aとすると最大2048点の入出力制御が可能になり、モーション制御LSI:G9103Cとすると最大64軸を制御することができます。
全て同じローカルLSIにする必要はなく、複数種類のローカルLSIを任意の台数組み合わせて使用することも可能です。
サイクリック通信
各ローカルLSIとは4byteのデータを15.1μs毎にサイクリックに通信します。
4byteの内容は、ローカルLSIによりそれぞれ異なっております。
例)
G9002A:32点の入出力、
G9103C:モーターの状態・汎用入出力、
G9004A:データの受渡状態
トランジェント通信
モーター制御などのデータはサイクリック通信の間に割り込ませて送受信します。
トランジェント通信は随時CPUからの指示で行われます。
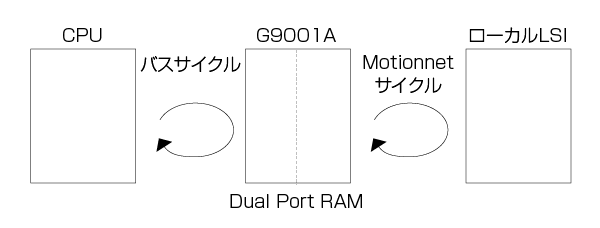
CPU制御
MotionnetのコントロールはセンターLSIが管理しており、CPUはセンターLSI:G9001AのDual Port RAMおよび送信用FIFO・受信用FIFOを介して受渡しする構造になっています。そのためCPUは高速なフィールドバスの通信速度を守る必要がなく、高速なCPUやリアルタイムOSが不要です。
モーター制御
モーター制御LSI(G9103C)には、パルスコントロール機能が内蔵されており、パルス出力方式、入出力信号論理設定などの情報と、速度・位置データを設定して動作コマンドを送信することで多様なパターンのモーター制御用パルスを出力することができます。例えば、台形駆動、S字加減速、原点復帰などに対応しています。
また、64軸内で最大7グループを組むことができ、グループ内での円弧補間、直線補間など単軸以外の補間制御も実現できます。
リモート制御
一般的にCPUは、同一基板上で多様なLSIをバス接続して制御します。このバス接続をセンターLSI(G9001A)とCPUエミュレーションLSI(G9004A)を使って、シリアル通信に変換し遠く離れた場所にある多様なLSIをリモート制御することが実現できるようになります。
- 関連サイト
-


-



