CANプロトコル基礎
CANは、国際的に規格化されたプロトコルです。ここでは、その規格の内容とCANの対応について説明します。
CANプロトコルの基本概要
CANプロトコルは、開発元であるBosch社が仕様書を定め、その後に国際標準化機構(ISO)が「ISO11898」「ISO11519」で規格化しました。ISO11898は、通信速度125Kbps~1Mpbsまでの高速CAN通信(CAN-C)の規格で、現在ではデータリンク層のみの規格「ISO11898-1」と物理層のみの規格「ISO11898-2」に分かれています。ISO11519は、通信速度が125Kbps以下の低速CAN通信の規格となります。

OSI基本参照モデルとは
会話をするときに同じ言語を使うように、情報通信でも共有の言語やルールを決める必要があります。CANをはじめとした情報通信は、ISOが規定したOSI基本参照モデルによって標準化されています。OSI参照モデルとは、ISOがコンピュータ通信における機能を階層構造に分割したモデルです。CANプロトコルはOSI基本参照モデルのトランスポート層、データリンク層、物理層の各層で規定を設けています。
OSI基本参照モデル
| ソフトウェア制御 | 7 | アプリケーション層 |
|---|---|---|
| 6 | プレゼンテーション層 | |
| 5 | セッション層 | |
| 4 | トランスポート層 | |
| 3 | ネットワーク層 | |
| ハードウェア制御 | 2 | データリンク層 |
| 1 | 物理層 |
4.トランスポート層の定義内容
トランスポート層では、再送制御のみを定義しています。CANの特長「高速で確実なデータ共有」でも触れましたが、送信エラーが発生した場合にデータを再送信する「永久リトライ」という機能があたります。
2.データリンク層の定義内容
データリンク層では、理論リンク制御のLLC(Logical Link Control)サブ層と、媒体アクセス制御MAC(Medium Access Control)サブ層に細分化され、主に電気的なパルス信号からフレームへの変換、データ衝突時のアービトレーション、データ伝送時の確認を行うACK応答、各種エラー検出や通知などが定義されています。下記内容についてはISO11898・ISO11519共通で規格化されています。
| 定義事項 | ||
|---|---|---|
| データリンク層 | LLC | 受信メッセージの選択(アクセプタンスフィルタリング) |
| オーバーロードの通知 | ||
| エラーリカバリー | ||
| MAC | メッセージのフレーム化 | |
| 接続制御方式 | ||
| データ衝突時のアービトレーション | ||
| 故障拡散抑制機能 | ||
| エラーの通知 | ||
| エラーの検出 | ||
| 応答方式 | ||
| 通信方式 | ||
1.物理層の定義内容
物理的な特性や仕様を定義する物理層では、ビットの同期・再同期やサンプリング・ポイントなどのビットタイミング、トランシーバやバスの特性について規定されていますが、コネクタやケーブルの形状については規格化されていません。また物理層に関しては、ISO11898とISO11519で共有の部分と異なる部分があります。
- 通信速度
-
- [ISO11898(高速)]
- 1Mbpsまで
-
- [ISO11519(低速CAN)]
- 125Kbpsまで
- CANバスの信号
-
- [ISO11898(高速)]
-
- [ISO11519(低速CAN)]
- 最大バス長
-
- [ISO11898(高速)]
- 40m/1Mbps
-
- [ISO11519(低速CAN)]
- 1Km/40Kbps
- 最大接続ユニット数
-
- [ISO11898(高速)]
- 最大30
-
- [ISO11519(低速CAN)]
- 最大20
- 信号レベル
-
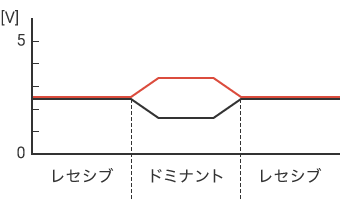
- [ISO11898(高速)]
-
バスの状態 レセッシブ(1) ドミナント(0) Min. Typ. Max. Min. Typ. Max. CANH 2.00 2.50 3.00 2.75 3.50 4.50 CANL 2.00 2.50 3.00 0.50 1.50 2.25 電位差 -0.50 0.00 0.05 1.50 2.00 3.00
-
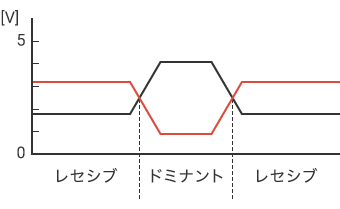
- [ISO11519(低速CAN)]
-
バスの状態 レセッシブ(1) ドミナント(0) Min. Typ. Max. Min. Typ. Max. CANH 1.60 1.75 1.90 3.85 4.00 5.00 CANL 3.10 3.25 3.40 0.00 1.00 1.15 電位差 -0.30 -1.50 ― 0.30 3.00 ―
- インピーダンス
-
- [ISO11898(高速)]
- 120Ω(Min.85Ω/Max.130Ω)
-
- [ISO11519(低速CAN)]
- 120Ω(Min.85Ω/Max.130Ω)
- バス抵抗率
-
- [ISO11898(高速)]
- 70mΩ/m
-
- [ISO11519(低速CAN)]
- 90mΩ/m
- バス遅延時間
-
- [ISO11898(高速)]
- 5ns/m
-
- [ISO11519(低速CAN)]
- 5ns/m
- 終端抵抗
-
- [ISO11898(高速)]
- 120Ω(Min.85Ω/Max.130Ω)
-
- [ISO11519(低速CAN)]
- 2.2KΩ(Min.2.09KΩ/Max.2.31KΩ)
- その他
-
- [ISO11898(高速)]
- ツイストペア線(シールド/アンシールド)
ループバス
-
- [ISO11519(低速CAN)]
- ツイストペア線(シールド/アンシールド)
オープンバス
CAN_LとGND静電容量 30pF/m
CAN_HとGND静電容量 30pF/m
SAEでもCANを規格化
ISO規格以外でも、SAE(Society of Automotive Engineers)が規格したJ2284/J2411でも、CANが規格化されています。また、CANを使用した通信規格という意味では、CiA(CAN in Automation)やODVA(Open Device Net Vendor Association)などの組織によっても規格化されています。
このページのまとめQ&A
Q. CANプロトコルの基本概要は何ですか?
A. CANはBosch社が開発し ISO11898 と ISO11519 により国際規格化されたシリアル通信プロトコルです。
Q. OSI参照モデルでCANが関係する層はどこですか?
A. トランスポート層・データリンク層・物理層で規定があり、通信方式やエラー処理を定義しています。
Q. トランスポート層では何を定義していますか?
A. 主に再送制御を担当し、送信エラー時にデータを送り直す永久リトライ機能が規定されています。
Q. データリンク層では何が定義されていますか?
A. フレーム化、アービトレーション、ACK応答、エラー検出などCAN通信の中核機能が規定されています。
Q. 物理層では何が規定されていますか?
A. ビットタイミングや信号レベル、バス特性など物理的仕様を定義し、高速CANと低速CANで要件が異なります。
キーエンスのデータロガー
-
NR-X シリーズ
マルチ入力データロガー
NR-Xシリーズは、“簡単操作・持ち運びのしやすさ・あらゆる計測シーンに対応”といったデータロガーに求められる機能を全て網羅した商品となります。クラス最小・最軽量の手のひらサイズでありながら、8種の計測ユニットに対応しており、最大576Chの多Ch計測も可能です。また従来、計測準備に最も時間がかかってた配線工数を、大幅に削減できる省配線システムにも対応。配線工数や配線ミス、断線時の復旧作業などを気にせずにご使用いただけます。もちろん、初めての方でも“かんたんに”操作できるよう、設定をサポートするヘルプ機能やひと目でわかるアイコンも採用しています。さらに、電源ユニットはAC・DC・バッテリーから選択でき、大容量リチウムイオンバッテリーで最長800分のデータ収集が可能。無線LANユニットも使用すれば計測する場所を選びません。



